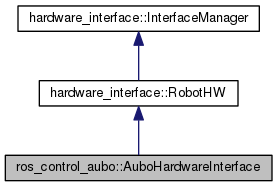
Hardware interface for a robot. More...
#include <aubo_hardware_interface.h>
Detailed Description
Hardware interface for a robot.
Definition at line 59 of file aubo_hardware_interface.h.
Constructor & Destructor Documentation
| ros_control_aubo::AuboHardwareInterface::AuboHardwareInterface | ( | ros::NodeHandle & | nh, |
| AuboNewDriver * | robot | ||
| ) |
Constructor.
- Parameters:
-
nh - Node handle for topics.
Definition at line 42 of file aubo_hardware_interface.cpp.
Member Function Documentation
| bool ros_control_aubo::AuboHardwareInterface::canSwitch | ( | const std::list< hardware_interface::ControllerInfo > & | start_list, |
| const std::list< hardware_interface::ControllerInfo > & | stop_list | ||
| ) | const [virtual] |
Reimplemented from hardware_interface::RobotHW.
Definition at line 154 of file aubo_hardware_interface.cpp.
| void ros_control_aubo::AuboHardwareInterface::doSwitch | ( | const std::list< hardware_interface::ControllerInfo > & | start_list, |
| const std::list< hardware_interface::ControllerInfo > & | stop_list | ||
| ) | [virtual] |
Reimplemented from hardware_interface::RobotHW.
Definition at line 225 of file aubo_hardware_interface.cpp.
| void ros_control_aubo::AuboHardwareInterface::init | ( | ) | [virtual] |
Initialize the hardware interface.
Definition at line 52 of file aubo_hardware_interface.cpp.
| void ros_control_aubo::AuboHardwareInterface::read | ( | ) | [virtual] |
Read the state from the robot hardware.
Definition at line 111 of file aubo_hardware_interface.cpp.
| void ros_control_aubo::AuboHardwareInterface::setMaxVelChange | ( | double | inp | ) |
Definition at line 128 of file aubo_hardware_interface.cpp.
| void ros_control_aubo::AuboHardwareInterface::write | ( | ) | [virtual] |
write the command to the robot hardware.
Definition at line 132 of file aubo_hardware_interface.cpp.
Member Data Documentation
hardware_interface::ForceTorqueSensorInterface ros_control_aubo::AuboHardwareInterface::force_torque_interface_ [protected] |
Definition at line 92 of file aubo_hardware_interface.h.
std::vector<double> ros_control_aubo::AuboHardwareInterface::joint_effort_ [protected] |
Definition at line 101 of file aubo_hardware_interface.h.
std::vector<std::string> ros_control_aubo::AuboHardwareInterface::joint_names_ [protected] |
Definition at line 98 of file aubo_hardware_interface.h.
std::vector<double> ros_control_aubo::AuboHardwareInterface::joint_position_ [protected] |
Definition at line 99 of file aubo_hardware_interface.h.
std::vector<double> ros_control_aubo::AuboHardwareInterface::joint_position_command_ [protected] |
Definition at line 102 of file aubo_hardware_interface.h.
hardware_interface::JointStateInterface ros_control_aubo::AuboHardwareInterface::joint_state_interface_ [protected] |
Definition at line 91 of file aubo_hardware_interface.h.
std::vector<double> ros_control_aubo::AuboHardwareInterface::joint_velocity_ [protected] |
Definition at line 100 of file aubo_hardware_interface.h.
std::vector<double> ros_control_aubo::AuboHardwareInterface::joint_velocity_command_ [protected] |
Definition at line 103 of file aubo_hardware_interface.h.
double ros_control_aubo::AuboHardwareInterface::max_vel_change_ [protected] |
Definition at line 109 of file aubo_hardware_interface.h.
Definition at line 88 of file aubo_hardware_interface.h.
std::size_t ros_control_aubo::AuboHardwareInterface::num_joints_ [protected] |
Definition at line 105 of file aubo_hardware_interface.h.
bool ros_control_aubo::AuboHardwareInterface::position_interface_running_ [protected] |
Definition at line 96 of file aubo_hardware_interface.h.
hardware_interface::PositionJointInterface ros_control_aubo::AuboHardwareInterface::position_joint_interface_ [protected] |
Definition at line 93 of file aubo_hardware_interface.h.
std::vector<double> ros_control_aubo::AuboHardwareInterface::prev_joint_velocity_command_ [protected] |
Definition at line 104 of file aubo_hardware_interface.h.
Definition at line 112 of file aubo_hardware_interface.h.
double ros_control_aubo::AuboHardwareInterface::robot_force_[3] = { 0., 0., 0. } [protected] |
Definition at line 106 of file aubo_hardware_interface.h.
double ros_control_aubo::AuboHardwareInterface::robot_torque_[3] = { 0., 0., 0. } [protected] |
Definition at line 107 of file aubo_hardware_interface.h.
bool ros_control_aubo::AuboHardwareInterface::velocity_interface_running_ [protected] |
Definition at line 95 of file aubo_hardware_interface.h.
hardware_interface::VelocityJointInterface ros_control_aubo::AuboHardwareInterface::velocity_joint_interface_ [protected] |
Definition at line 94 of file aubo_hardware_interface.h.
The documentation for this class was generated from the following files: