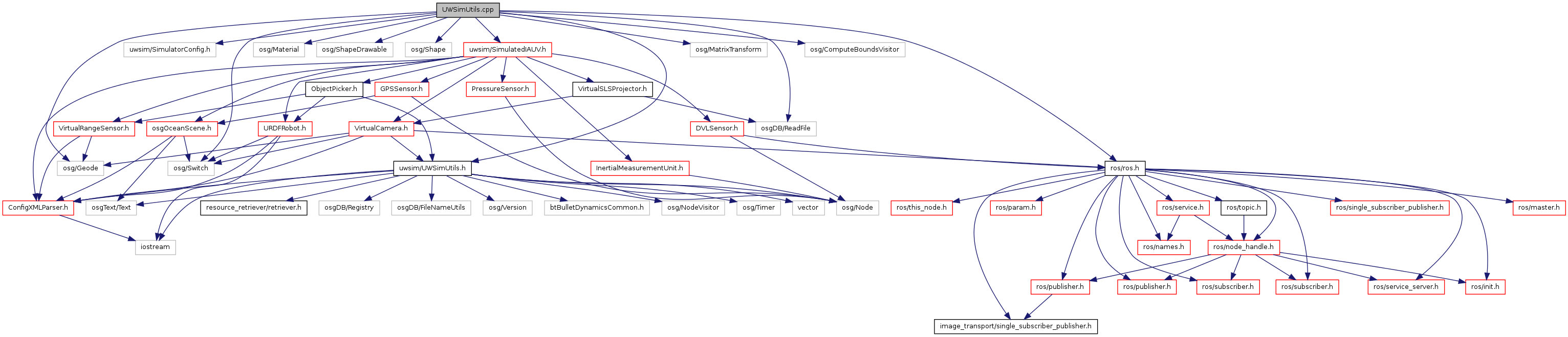
#include <ros/ros.h>#include <uwsim/SimulatorConfig.h>#include <uwsim/UWSimUtils.h>#include <osg/Material>#include <osg/ShapeDrawable>#include <osg/Shape>#include <osg/Geode>#include <osg/Switch>#include <osg/MatrixTransform>#include <osgDB/ReadFile>#include <osg/ComputeBoundsVisitor>#include "uwsim/SimulatedIAUV.h"
Include dependency graph for UWSimUtils.cpp:
Go to the source code of this file.
Functions | |
| osg::Node * | createHeightField (osg::ref_ptr< osg::Node > object, std::string texFile, double percent, const std::vector< boost::shared_ptr< SimulatedIAUV > > vehicles) |
| osg::Node * | findRN (std::string target, osg::Group *root) |
| boost::shared_ptr< osg::Matrix > | getWorldCoords (osg::Node *node) |
Function Documentation
| osg::Node* createHeightField | ( | osg::ref_ptr< osg::Node > | object, |
| std::string | texFile, | ||
| double | percent, | ||
| const std::vector< boost::shared_ptr< SimulatedIAUV > > | vehicles | ||
| ) |
Definition at line 468 of file UWSimUtils.cpp.
| osg::Node* findRN | ( | std::string | target, |
| osg::Group * | root | ||
| ) |
Definition at line 126 of file UWSimUtils.cpp.
| boost::shared_ptr<osg::Matrix> getWorldCoords | ( | osg::Node * | node | ) |
Definition at line 401 of file UWSimUtils.cpp.