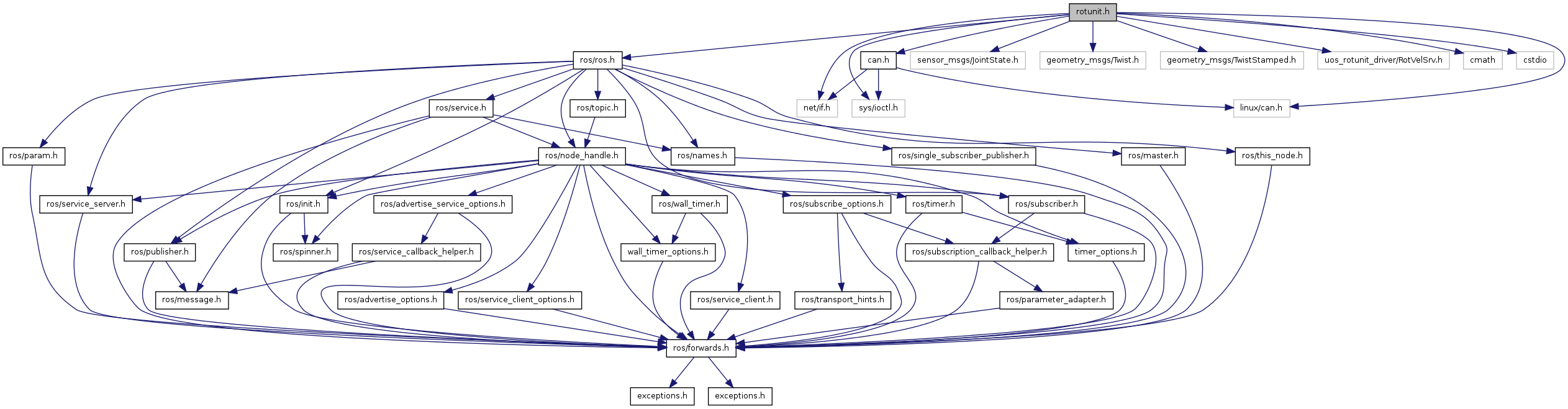
#include <net/if.h>#include <sys/ioctl.h>#include <linux/can.h>#include <ros/ros.h>#include <sensor_msgs/JointState.h>#include <geometry_msgs/Twist.h>#include <geometry_msgs/TwistStamped.h>#include <uos_rotunit_driver/RotVelSrv.h>#include <cmath>#include <cstdio>#include "can.h"
Include dependency graph for rotunit.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Rotunit |
Defines | |
| #define | CAN_GETROTUNIT 0x00000010 |
| #define | CAN_SETROTUNT 0x00000080 |
Define Documentation
| #define CAN_GETROTUNIT 0x00000010 |
| #define CAN_SETROTUNT 0x00000080 |