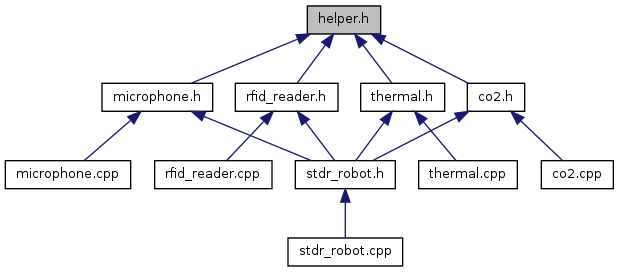
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | stdr_robot |
The main namespace for STDR Robot. | |
Defines | |
| #define | PI 3.141592653589793 |
Functions | |
| static bool | stdr_robot::angCheck (float target_, float min_, float max_) |
| Checks if an angle is between two others. Supposes that min < max. | |