Public Member Functions | |
| GraphName | getDefaultNodeName () |
| LaserScanPublisher (LaserScannerDevice laserScannerDevice) | |
| void | onShutdownComplete (Node node) |
| void | onStart (ConnectedNode connectedNode) |
Package Functions | |
| Publisher< sensor_msgs.LaserScan > | getPublisher () |
| sensor_msgs.LaserScan | toLaserScanMessage (String laserFrame, LaserScan scan, sensor_msgs.LaserScan result) |
Private Attributes | |
| final LaserScannerDevice | laserScannerDevice |
| Publisher< sensor_msgs.LaserScan > | publisher |
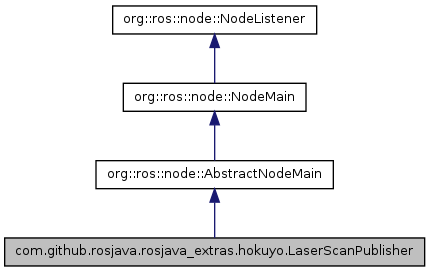
Detailed Description
Definition at line 32 of file LaserScanPublisher.java.
Constructor & Destructor Documentation
| com.github.rosjava.rosjava_extras.hokuyo.LaserScanPublisher.LaserScanPublisher | ( | LaserScannerDevice | laserScannerDevice | ) | [inline] |
We need a way to adjust time stamps because it is not (easily) possible to change a tablet's clock.
Definition at line 42 of file LaserScanPublisher.java.
Member Function Documentation
| GraphName com.github.rosjava.rosjava_extras.hokuyo.LaserScanPublisher.getDefaultNodeName | ( | ) | [inline] |
Implements org::ros::node::NodeMain.
Definition at line 47 of file LaserScanPublisher.java.
| Publisher<sensor_msgs.LaserScan> com.github.rosjava.rosjava_extras.hokuyo.LaserScanPublisher.getPublisher | ( | ) | [inline, package] |
Definition at line 75 of file LaserScanPublisher.java.
| void com.github.rosjava.rosjava_extras.hokuyo.LaserScanPublisher.onShutdownComplete | ( | Node | node | ) | [inline] |
Reimplemented from org::ros::node::AbstractNodeMain.
Definition at line 70 of file LaserScanPublisher.java.
| void com.github.rosjava.rosjava_extras.hokuyo.LaserScanPublisher.onStart | ( | ConnectedNode | connectedNode | ) | [inline] |
Reimplemented from org::ros::node::AbstractNodeMain.
Definition at line 52 of file LaserScanPublisher.java.
| sensor_msgs.LaserScan com.github.rosjava.rosjava_extras.hokuyo.LaserScanPublisher.toLaserScanMessage | ( | String | laserFrame, |
| LaserScan | scan, | ||
| sensor_msgs.LaserScan | result | ||
| ) | [inline, package] |
Construct a LaserScan message from sensor readings and the laser configuration.
Also gets rid of readings that don't contain any information.
Some laser scanners have blind areas before and after the actual detection range. These are indicated by the frontStep and the lastStep properties of the laser's configuration. Since the blind values never change, we can just ignore them when copying the range readings.
- Parameters:
-
laserFrame the laser's sensor frame scan the actual range readings.
- Returns:
- a new sensor_msgs/LaserScan message
Definition at line 97 of file LaserScanPublisher.java.
Member Data Documentation
final LaserScannerDevice com.github.rosjava.rosjava_extras.hokuyo.LaserScanPublisher.laserScannerDevice [private] |
Definition at line 34 of file LaserScanPublisher.java.
Publisher<sensor_msgs.LaserScan> com.github.rosjava.rosjava_extras.hokuyo.LaserScanPublisher.publisher [private] |
Definition at line 36 of file LaserScanPublisher.java.
The documentation for this class was generated from the following file: