Manages the creation of waypoints and how to send them to Purepursuit. More...
Public Member Functions | |
| def | __init__ |
| def | convertListOfPointPathIntoGoal |
| Starts the route (inverse order of waypoints) | |
| def | createNewPoint |
| Creates a new PointPath and save it a list. | |
| def | deleteAllPointsCB |
| Callback called to create a new poing. | |
| def | deletePointCB |
| Callback called to create a new poing. | |
| def | newPointCB |
| Callback called to create a new poing. | |
| def | reverseRouteCB |
| Starts the route on the inverse direction. | |
| def | startRouteCB |
| Starts the route. | |
| def | stopRouteCB |
| Stops the current route if it's started. | |
Public Attributes | |
| counter_points | |
| print 'Creating new point d'%(self.counter_points) | |
| frame_id | |
| initial_point | |
| list_of_points | |
| menu_handler | |
| planner_client | |
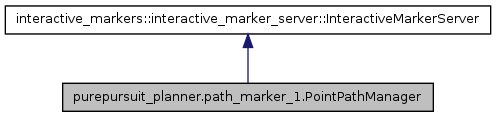
Detailed Description
Manages the creation of waypoints and how to send them to Purepursuit.
Definition at line 139 of file path_marker_1.py.
Constructor & Destructor Documentation
| def purepursuit_planner.path_marker_1.PointPathManager.__init__ | ( | self, | |
| name, | |||
| frame_id, | |||
| planner | |||
| ) |
Definition at line 141 of file path_marker_1.py.
Member Function Documentation
| def purepursuit_planner.path_marker_1.PointPathManager.convertListOfPointPathIntoGoal | ( | self, | |
inverse = False |
|||
| ) |
Starts the route (inverse order of waypoints)
Definition at line 247 of file path_marker_1.py.
Creates a new PointPath and save it a list.
Definition at line 172 of file path_marker_1.py.
| def purepursuit_planner.path_marker_1.PointPathManager.deleteAllPointsCB | ( | self, | |
| feedback | |||
| ) |
Callback called to create a new poing.
Definition at line 217 of file path_marker_1.py.
| def purepursuit_planner.path_marker_1.PointPathManager.deletePointCB | ( | self, | |
| feedback | |||
| ) |
Callback called to create a new poing.
Definition at line 207 of file path_marker_1.py.
| def purepursuit_planner.path_marker_1.PointPathManager.newPointCB | ( | self, | |
| feedback | |||
| ) |
Callback called to create a new poing.
Definition at line 202 of file path_marker_1.py.
| def purepursuit_planner.path_marker_1.PointPathManager.reverseRouteCB | ( | self, | |
| feedback | |||
| ) |
Starts the route on the inverse direction.
Definition at line 235 of file path_marker_1.py.
| def purepursuit_planner.path_marker_1.PointPathManager.startRouteCB | ( | self, | |
| feedback | |||
| ) |
Starts the route.
Definition at line 228 of file path_marker_1.py.
| def purepursuit_planner.path_marker_1.PointPathManager.stopRouteCB | ( | self, | |
| feedback | |||
| ) |
Stops the current route if it's started.
Definition at line 242 of file path_marker_1.py.
Member Data Documentation
print 'Creating new point d'%(self.counter_points)
Definition at line 141 of file path_marker_1.py.
Definition at line 141 of file path_marker_1.py.
Definition at line 141 of file path_marker_1.py.
Definition at line 141 of file path_marker_1.py.
Definition at line 141 of file path_marker_1.py.
Definition at line 141 of file path_marker_1.py.
The documentation for this class was generated from the following file: