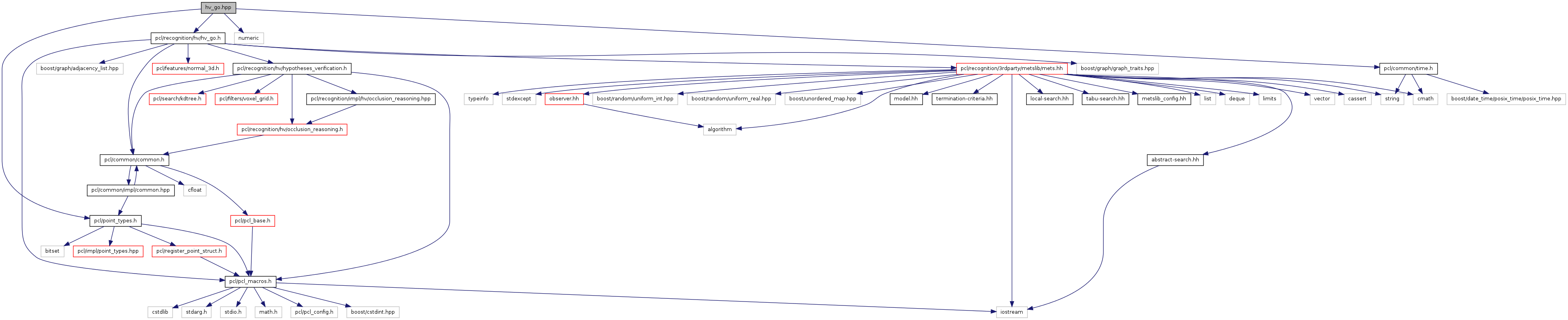
#include <pcl/recognition/hv/hv_go.h>#include <numeric>#include <pcl/common/time.h>#include <pcl/point_types.h>
Include dependency graph for hv_go.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Defines | |
| #define | PCL_INSTANTIATE_GoHV(T1, T2) template class PCL_EXPORTS pcl::GlobalHypothesesVerification<T1,T2>; |
Functions | |
| template<typename PointT , typename NormalT > | |
| void | extractEuclideanClustersSmooth (const typename pcl::PointCloud< PointT > &cloud, const typename pcl::PointCloud< NormalT > &normals, float tolerance, const typename pcl::search::Search< PointT >::Ptr &tree, std::vector< pcl::PointIndices > &clusters, double eps_angle, float curvature_threshold, unsigned int min_pts_per_cluster, unsigned int max_pts_per_cluster=(std::numeric_limits< int >::max)()) |
Define Documentation
| #define PCL_INSTANTIATE_GoHV | ( | T1, | |
| T2 | |||
| ) | template class PCL_EXPORTS pcl::GlobalHypothesesVerification<T1,T2>; |
Function Documentation
template<typename PointT , typename NormalT >
| void extractEuclideanClustersSmooth | ( | const typename pcl::PointCloud< PointT > & | cloud, |
| const typename pcl::PointCloud< NormalT > & | normals, | ||
| float | tolerance, | ||
| const typename pcl::search::Search< PointT >::Ptr & | tree, | ||
| std::vector< pcl::PointIndices > & | clusters, | ||
| double | eps_angle, | ||
| float | curvature_threshold, | ||
| unsigned int | min_pts_per_cluster, | ||
| unsigned int | max_pts_per_cluster = (std::numeric_limits<int>::max) () |
||
| ) | [inline] |