CorrespondenceRejectorSampleConsensus2D implements a pixel-based correspondence rejection using Random Sample Consensus to identify inliers (and reject outliers) More...
#include <correspondence_rejection_sample_consensus_2d.h>
Public Types | |
| typedef boost::shared_ptr < const CorrespondenceRejectorSampleConsensus2D > | ConstPtr |
| typedef boost::shared_ptr < CorrespondenceRejectorSampleConsensus2D > | Ptr |
Public Member Functions | |
| CorrespondenceRejectorSampleConsensus2D () | |
| Empty constructor. Sets the inlier threshold to 5cm (0.05m), and the maximum number of iterations to 1000. | |
| void | getCameraCenters (float &cx, float &cy) const |
| Reads back the camera center parameters of the target camera. | |
| void | getFocalLengths (float &fx, float &fy) const |
| Reads back the focal length parameters of the target camera. | |
| void | getRemainingCorrespondences (const pcl::Correspondences &original_correspondences, pcl::Correspondences &remaining_correspondences) |
| Get a list of valid correspondences after rejection from the original set of correspondences. | |
| void | setCameraCenters (const float cx, const float cy) |
| Sets the camera center parameters of the target camera. | |
| void | setFocalLengths (const float fx, const float fy) |
| Sets the focal length parameters of the target camera. | |
Protected Member Functions | |
| void | applyRejection (pcl::Correspondences &correspondences) |
| Apply the rejection algorithm. | |
Protected Attributes | |
| Eigen::Matrix3f | projection_matrix_ |
| Camera projection matrix. | |
Private Types | |
| typedef pcl::PointCloud< PointT > | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Detailed Description
template<typename PointT>
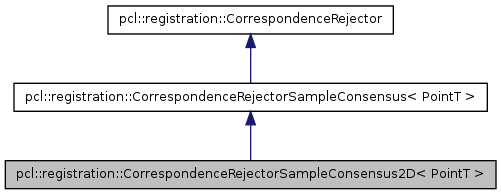
class pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >
CorrespondenceRejectorSampleConsensus2D implements a pixel-based correspondence rejection using Random Sample Consensus to identify inliers (and reject outliers)
Definition at line 55 of file correspondence_rejection_sample_consensus_2d.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const CorrespondenceRejectorSampleConsensus2D> pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::ConstPtr |
Reimplemented from pcl::registration::CorrespondenceRejectorSampleConsensus< PointT >.
Definition at line 73 of file correspondence_rejection_sample_consensus_2d.h.
typedef pcl::PointCloud<PointT> pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::PointCloud [private] |
Reimplemented from pcl::registration::CorrespondenceRejectorSampleConsensus< PointT >.
Definition at line 57 of file correspondence_rejection_sample_consensus_2d.h.
typedef PointCloud::ConstPtr pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::PointCloudConstPtr [private] |
Reimplemented from pcl::registration::CorrespondenceRejectorSampleConsensus< PointT >.
Definition at line 59 of file correspondence_rejection_sample_consensus_2d.h.
typedef PointCloud::Ptr pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::PointCloudPtr [private] |
Reimplemented from pcl::registration::CorrespondenceRejectorSampleConsensus< PointT >.
Definition at line 58 of file correspondence_rejection_sample_consensus_2d.h.
| typedef boost::shared_ptr<CorrespondenceRejectorSampleConsensus2D> pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::Ptr |
Reimplemented from pcl::registration::CorrespondenceRejectorSampleConsensus< PointT >.
Definition at line 72 of file correspondence_rejection_sample_consensus_2d.h.
Constructor & Destructor Documentation
| pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::CorrespondenceRejectorSampleConsensus2D | ( | ) | [inline] |
Empty constructor. Sets the inlier threshold to 5cm (0.05m), and the maximum number of iterations to 1000.
Definition at line 78 of file correspondence_rejection_sample_consensus_2d.h.
Member Function Documentation
| void pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::applyRejection | ( | pcl::Correspondences & | correspondences | ) | [inline, protected, virtual] |
Apply the rejection algorithm.
- Parameters:
-
[out] correspondences the set of resultant correspondences.
Reimplemented from pcl::registration::CorrespondenceRejectorSampleConsensus< PointT >.
Definition at line 148 of file correspondence_rejection_sample_consensus_2d.h.
| void pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::getCameraCenters | ( | float & | cx, |
| float & | cy | ||
| ) | const [inline] |
Reads back the camera center parameters of the target camera.
- Parameters:
-
[out] cx the x-coordinate of the camera center [out] cy the y-coordinate of the camera center
Definition at line 136 of file correspondence_rejection_sample_consensus_2d.h.
| void pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::getFocalLengths | ( | float & | fx, |
| float & | fy | ||
| ) | const [inline] |
Reads back the focal length parameters of the target camera.
- Parameters:
-
[out] fx the focal length in pixels along the x-axis of the image [out] fy the focal length in pixels along the y-axis of the image
Definition at line 113 of file correspondence_rejection_sample_consensus_2d.h.
| void pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::getRemainingCorrespondences | ( | const pcl::Correspondences & | original_correspondences, |
| pcl::Correspondences & | remaining_correspondences | ||
| ) | [inline, virtual] |
Get a list of valid correspondences after rejection from the original set of correspondences.
- Parameters:
-
[in] original_correspondences the set of initial correspondences given [out] remaining_correspondences the resultant filtered set of remaining correspondences
Reimplemented from pcl::registration::CorrespondenceRejectorSampleConsensus< PointT >.
Definition at line 46 of file correspondence_rejection_sample_consensus_2d.hpp.
| void pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::setCameraCenters | ( | const float | cx, |
| const float | cy | ||
| ) | [inline] |
Sets the camera center parameters of the target camera.
- Parameters:
-
[in] cx the x-coordinate of the camera center [in] cy the y-coordinate of the camera center
Definition at line 125 of file correspondence_rejection_sample_consensus_2d.h.
| void pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::setFocalLengths | ( | const float | fx, |
| const float | fy | ||
| ) | [inline] |
Sets the focal length parameters of the target camera.
- Parameters:
-
[in] fx the focal length in pixels along the x-axis of the image [in] fy the focal length in pixels along the y-axis of the image
Definition at line 102 of file correspondence_rejection_sample_consensus_2d.h.
Member Data Documentation
Eigen::Matrix3f pcl::registration::CorrespondenceRejectorSampleConsensus2D< PointT >::projection_matrix_ [protected] |
Camera projection matrix.
Definition at line 154 of file correspondence_rejection_sample_consensus_2d.h.
The documentation for this class was generated from the following files: