StatisticalOutlierRemoval uses point neighborhood statistics to filter outlier data. For more information check: More...
#include <statistical_outlier_removal.h>
Public Member Functions | |
| int | getMeanK () |
| Get the number of points to use for mean distance estimation. | |
| bool | getNegative () |
| Get the value of the internal negative_ parameter. If true, all points except the input indices will be returned. | |
| double | getStddevMulThresh () |
| Get the standard deviation multiplier threshold as set by the user. | |
| void | setMeanK (int nr_k) |
| Set the number of points (k) to use for mean distance estimation. | |
| void | setNegative (bool negative) |
| Set whether the indices should be returned, or all points except the indices. | |
| void | setStddevMulThresh (double std_mul) |
| Set the standard deviation multiplier threshold. All points outside the
will be considered outliers, where | |
| StatisticalOutlierRemoval (bool extract_removed_indices=false) | |
| Empty constructor. | |
Protected Member Functions | |
| void | applyFilter (PCLPointCloud2 &output) |
| Abstract filter method. | |
Protected Attributes | |
| int | mean_k_ |
| The number of points to use for mean distance estimation. | |
| bool | negative_ |
| If true, the outliers will be returned instead of the inliers (default: false). | |
| double | std_mul_ |
Standard deviations threshold (i.e., points outside of  will be marked as outliers). will be marked as outliers). | |
| KdTreePtr | tree_ |
| A pointer to the spatial search object. | |
Private Types | |
| typedef pcl::search::Search < pcl::PointXYZ > | KdTree |
| typedef pcl::search::Search < pcl::PointXYZ >::Ptr | KdTreePtr |
| typedef pcl::PCLPointCloud2 | PCLPointCloud2 |
| typedef PCLPointCloud2::ConstPtr | PCLPointCloud2ConstPtr |
| typedef PCLPointCloud2::Ptr | PCLPointCloud2Ptr |
Detailed Description
template<>
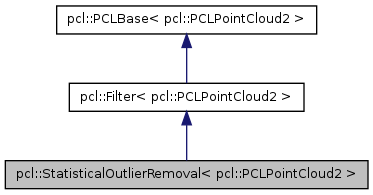
class pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >
StatisticalOutlierRemoval uses point neighborhood statistics to filter outlier data. For more information check:
- R. B. Rusu, Z. C. Marton, N. Blodow, M. Dolha, and M. Beetz. Towards 3D Point Cloud Based Object Maps for Household Environments Robotics and Autonomous Systems Journal (Special Issue on Semantic Knowledge), 2008.
- Note:
- setFilterFieldName (), setFilterLimits (), and setFilterLimitNegative () are ignored.
Definition at line 202 of file filters/include/pcl/filters/statistical_outlier_removal.h.
Member Typedef Documentation
typedef pcl::search::Search<pcl::PointXYZ> pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::KdTree [private] |
Definition at line 210 of file filters/include/pcl/filters/statistical_outlier_removal.h.
typedef pcl::search::Search<pcl::PointXYZ>::Ptr pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::KdTreePtr [private] |
Definition at line 211 of file filters/include/pcl/filters/statistical_outlier_removal.h.
typedef pcl::PCLPointCloud2 pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::PCLPointCloud2 [private] |
Reimplemented from pcl::Filter< pcl::PCLPointCloud2 >.
Definition at line 213 of file filters/include/pcl/filters/statistical_outlier_removal.h.
typedef PCLPointCloud2::ConstPtr pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::PCLPointCloud2ConstPtr [private] |
Reimplemented from pcl::Filter< pcl::PCLPointCloud2 >.
Definition at line 215 of file filters/include/pcl/filters/statistical_outlier_removal.h.
typedef PCLPointCloud2::Ptr pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::PCLPointCloud2Ptr [private] |
Reimplemented from pcl::Filter< pcl::PCLPointCloud2 >.
Definition at line 214 of file filters/include/pcl/filters/statistical_outlier_removal.h.
Constructor & Destructor Documentation
| pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::StatisticalOutlierRemoval | ( | bool | extract_removed_indices = false | ) | [inline] |
Empty constructor.
Definition at line 219 of file filters/include/pcl/filters/statistical_outlier_removal.h.
Member Function Documentation
| void pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::applyFilter | ( | PCLPointCloud2 & | output | ) | [protected, virtual] |
Abstract filter method.
The implementation needs to set output.{data, row_step, point_step, width, height, is_dense}.
- Parameters:
-
[out] output the resultant filtered point cloud
Implements pcl::Filter< pcl::PCLPointCloud2 >.
Definition at line 46 of file filters/src/statistical_outlier_removal.cpp.
| int pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::getMeanK | ( | ) | [inline] |
Get the number of points to use for mean distance estimation.
Definition at line 237 of file filters/include/pcl/filters/statistical_outlier_removal.h.
| bool pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::getNegative | ( | ) | [inline] |
Get the value of the internal negative_ parameter. If true, all points except the input indices will be returned.
- Returns:
- The value of the "negative" flag
Definition at line 275 of file filters/include/pcl/filters/statistical_outlier_removal.h.
| double pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::getStddevMulThresh | ( | ) | [inline] |
Get the standard deviation multiplier threshold as set by the user.
Definition at line 256 of file filters/include/pcl/filters/statistical_outlier_removal.h.
| void pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::setMeanK | ( | int | nr_k | ) | [inline] |
Set the number of points (k) to use for mean distance estimation.
- Parameters:
-
nr_k the number of points to use for mean distance estimation
Definition at line 230 of file filters/include/pcl/filters/statistical_outlier_removal.h.
| void pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::setNegative | ( | bool | negative | ) | [inline] |
Set whether the indices should be returned, or all points except the indices.
- Parameters:
-
negative true if all points except the input indices will be returned, false otherwise
Definition at line 265 of file filters/include/pcl/filters/statistical_outlier_removal.h.
| void pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::setStddevMulThresh | ( | double | std_mul | ) | [inline] |
Set the standard deviation multiplier threshold. All points outside the
![\[ \mu \pm \sigma \cdot std\_mul \]](form_17.png)
will be considered outliers, where  is the estimated mean, and
is the estimated mean, and  is the standard deviation.
is the standard deviation.
- Parameters:
-
std_mul the standard deviation multiplier threshold
Definition at line 249 of file filters/include/pcl/filters/statistical_outlier_removal.h.
Member Data Documentation
int pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::mean_k_ [protected] |
The number of points to use for mean distance estimation.
Definition at line 282 of file filters/include/pcl/filters/statistical_outlier_removal.h.
bool pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::negative_ [protected] |
If true, the outliers will be returned instead of the inliers (default: false).
Definition at line 293 of file filters/include/pcl/filters/statistical_outlier_removal.h.
double pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::std_mul_ [protected] |
Standard deviations threshold (i.e., points outside of will be marked as outliers).
Definition at line 287 of file filters/include/pcl/filters/statistical_outlier_removal.h.
KdTreePtr pcl::StatisticalOutlierRemoval< pcl::PCLPointCloud2 >::tree_ [protected] |
A pointer to the spatial search object.
Definition at line 290 of file filters/include/pcl/filters/statistical_outlier_removal.h.
The documentation for this class was generated from the following files: