ShadowPoints removes the ghost points appearing on edge discontinuties More...
#include <shadowpoints.h>
Public Types | |
| typedef boost::shared_ptr < const ShadowPoints< PointT, NormalT > > | ConstPtr |
| typedef boost::shared_ptr < ShadowPoints< PointT, NormalT > > | Ptr |
Public Member Functions | |
| NormalsPtr | getNormals () const |
| Get the normals computed on the input point cloud. | |
| float | getThreshold () const |
| Get the threshold for shadow points rejection. | |
| void | setNormals (const NormalsPtr &normals) |
| Set the normals computed on the input point cloud. | |
| void | setThreshold (float threshold) |
| Set the threshold for shadow points rejection. | |
| ShadowPoints (bool extract_removed_indices=false) | |
| Empty constructor. | |
Protected Member Functions | |
| void | applyFilter (PointCloud &output) |
| Sample of point indices into a separate PointCloud. | |
| void | applyFilter (std::vector< int > &indices) |
| Sample of point indices. | |
Protected Attributes | |
| NormalsPtr | input_normals_ |
| The normals computed at each point in the input cloud. | |
Private Types | |
| typedef pcl::PointCloud < NormalT >::Ptr | NormalsPtr |
| typedef FilterIndices< PointT > ::PointCloud | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Private Attributes | |
| float | threshold_ |
| Threshold for shadow point rejection. | |
Detailed Description
template<typename PointT, typename NormalT>
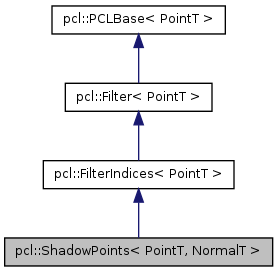
class pcl::ShadowPoints< PointT, NormalT >
ShadowPoints removes the ghost points appearing on edge discontinuties
Definition at line 53 of file shadowpoints.h.
Member Typedef Documentation
| typedef boost::shared_ptr< const ShadowPoints<PointT, NormalT> > pcl::ShadowPoints< PointT, NormalT >::ConstPtr |
Reimplemented from pcl::FilterIndices< PointT >.
Definition at line 73 of file shadowpoints.h.
typedef pcl::PointCloud<NormalT>::Ptr pcl::ShadowPoints< PointT, NormalT >::NormalsPtr [private] |
Definition at line 68 of file shadowpoints.h.
typedef FilterIndices<PointT>::PointCloud pcl::ShadowPoints< PointT, NormalT >::PointCloud [private] |
Reimplemented from pcl::FilterIndices< PointT >.
Definition at line 65 of file shadowpoints.h.
typedef PointCloud::ConstPtr pcl::ShadowPoints< PointT, NormalT >::PointCloudConstPtr [private] |
Reimplemented from pcl::Filter< PointT >.
Definition at line 67 of file shadowpoints.h.
typedef PointCloud::Ptr pcl::ShadowPoints< PointT, NormalT >::PointCloudPtr [private] |
Reimplemented from pcl::Filter< PointT >.
Definition at line 66 of file shadowpoints.h.
| typedef boost::shared_ptr< ShadowPoints<PointT, NormalT> > pcl::ShadowPoints< PointT, NormalT >::Ptr |
Reimplemented from pcl::FilterIndices< PointT >.
Definition at line 72 of file shadowpoints.h.
Constructor & Destructor Documentation
| pcl::ShadowPoints< PointT, NormalT >::ShadowPoints | ( | bool | extract_removed_indices = false | ) | [inline] |
Empty constructor.
Definition at line 76 of file shadowpoints.h.
Member Function Documentation
| void pcl::ShadowPoints< PointT, NormalT >::applyFilter | ( | PointCloud & | output | ) | [protected, virtual] |
Sample of point indices into a separate PointCloud.
- Parameters:
-
[out] output the resultant point cloud
Implements pcl::Filter< PointT >.
Definition at line 47 of file shadowpoints.hpp.
| void pcl::ShadowPoints< PointT, NormalT >::applyFilter | ( | std::vector< int > & | indices | ) | [protected, virtual] |
Sample of point indices.
- Parameters:
-
[out] indices the resultant point cloud indices
Implements pcl::FilterIndices< PointT >.
Definition at line 84 of file shadowpoints.hpp.
| NormalsPtr pcl::ShadowPoints< PointT, NormalT >::getNormals | ( | ) | const [inline] |
Get the normals computed on the input point cloud.
Definition at line 92 of file shadowpoints.h.
| float pcl::ShadowPoints< PointT, NormalT >::getThreshold | ( | ) | const [inline] |
Get the threshold for shadow points rejection.
Definition at line 102 of file shadowpoints.h.
| void pcl::ShadowPoints< PointT, NormalT >::setNormals | ( | const NormalsPtr & | normals | ) | [inline] |
Set the normals computed on the input point cloud.
- Parameters:
-
[in] normals the normals computed for the input cloud
Definition at line 88 of file shadowpoints.h.
| void pcl::ShadowPoints< PointT, NormalT >::setThreshold | ( | float | threshold | ) | [inline] |
Set the threshold for shadow points rejection.
- Parameters:
-
[in] thresold the threshold
Definition at line 98 of file shadowpoints.h.
Member Data Documentation
NormalsPtr pcl::ShadowPoints< PointT, NormalT >::input_normals_ [protected] |
The normals computed at each point in the input cloud.
Definition at line 107 of file shadowpoints.h.
float pcl::ShadowPoints< PointT, NormalT >::threshold_ [private] |
Threshold for shadow point rejection.
Definition at line 125 of file shadowpoints.h.
The documentation for this class was generated from the following files: