RandomSample applies a random sampling with uniform probability. Based off Algorithm A from the paper "Faster Methods for Random Sampling" by Jeffrey Scott Vitter. The algorithm runs in O(N) and results in sorted indices http://www.ittc.ku.edu/~jsv/Papers/Vit84.sampling.pdf More...
#include <random_sample.h>
Public Types | |
| typedef boost::shared_ptr < const RandomSample< PointT > > | ConstPtr |
| typedef boost::shared_ptr < RandomSample< PointT > > | Ptr |
Public Member Functions | |
| unsigned int | getSample () |
| Get the value of the internal sample parameter. | |
| unsigned int | getSeed () |
| Get the value of the internal seed parameter. | |
| RandomSample (bool extract_removed_indices=false) | |
| Empty constructor. | |
| void | setSample (unsigned int sample) |
| Set number of indices to be sampled. | |
| void | setSeed (unsigned int seed) |
| Set seed of random function. | |
Protected Member Functions | |
| void | applyFilter (PointCloud &output) |
| Sample of point indices into a separate PointCloud. | |
| void | applyFilter (std::vector< int > &indices) |
| Sample of point indices. | |
| float | unifRand () |
| Return a random number fast using a LCG (Linear Congruential Generator) algorithm. See http://software.intel.com/en-us/articles/fast-random-number-generator-on-the-intel-pentiumr-4-processor/ for more information. | |
Protected Attributes | |
| unsigned int | sample_ |
| Number of indices that will be returned. | |
| unsigned int | seed_ |
| Random number seed. | |
Private Types | |
| typedef FilterIndices< PointT > ::PointCloud | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
Detailed Description
template<typename PointT>
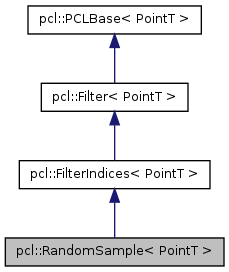
class pcl::RandomSample< PointT >
RandomSample applies a random sampling with uniform probability. Based off Algorithm A from the paper "Faster Methods for Random Sampling" by Jeffrey Scott Vitter. The algorithm runs in O(N) and results in sorted indices http://www.ittc.ku.edu/~jsv/Papers/Vit84.sampling.pdf
Definition at line 56 of file random_sample.h.
Member Typedef Documentation
| typedef boost::shared_ptr< const RandomSample<PointT> > pcl::RandomSample< PointT >::ConstPtr |
Reimplemented from pcl::FilterIndices< PointT >.
Definition at line 75 of file random_sample.h.
typedef FilterIndices<PointT>::PointCloud pcl::RandomSample< PointT >::PointCloud [private] |
Reimplemented from pcl::FilterIndices< PointT >.
Definition at line 68 of file random_sample.h.
typedef PointCloud::ConstPtr pcl::RandomSample< PointT >::PointCloudConstPtr [private] |
Reimplemented from pcl::Filter< PointT >.
Definition at line 70 of file random_sample.h.
typedef PointCloud::Ptr pcl::RandomSample< PointT >::PointCloudPtr [private] |
Reimplemented from pcl::Filter< PointT >.
Definition at line 69 of file random_sample.h.
| typedef boost::shared_ptr< RandomSample<PointT> > pcl::RandomSample< PointT >::Ptr |
Reimplemented from pcl::FilterIndices< PointT >.
Definition at line 74 of file random_sample.h.
Constructor & Destructor Documentation
| pcl::RandomSample< PointT >::RandomSample | ( | bool | extract_removed_indices = false | ) | [inline] |
Empty constructor.
Definition at line 78 of file random_sample.h.
Member Function Documentation
| void pcl::RandomSample< PointT >::applyFilter | ( | PointCloud & | output | ) | [protected, virtual] |
Sample of point indices into a separate PointCloud.
- Parameters:
-
output the resultant point cloud
Implements pcl::Filter< PointT >.
Definition at line 48 of file random_sample.hpp.
| void pcl::RandomSample< PointT >::applyFilter | ( | std::vector< int > & | indices | ) | [protected, virtual] |
Sample of point indices.
- Parameters:
-
indices the resultant point cloud indices
Implements pcl::FilterIndices< PointT >.
Definition at line 93 of file random_sample.hpp.
| unsigned int pcl::RandomSample< PointT >::getSample | ( | ) | [inline] |
Get the value of the internal sample parameter.
Definition at line 98 of file random_sample.h.
| unsigned int pcl::RandomSample< PointT >::getSeed | ( | ) | [inline] |
Get the value of the internal seed parameter.
Definition at line 115 of file random_sample.h.
| void pcl::RandomSample< PointT >::setSample | ( | unsigned int | sample | ) | [inline] |
Set number of indices to be sampled.
- Parameters:
-
sample
Definition at line 90 of file random_sample.h.
| void pcl::RandomSample< PointT >::setSeed | ( | unsigned int | seed | ) | [inline] |
| float pcl::RandomSample< PointT >::unifRand | ( | ) | [inline, protected] |
Return a random number fast using a LCG (Linear Congruential Generator) algorithm. See http://software.intel.com/en-us/articles/fast-random-number-generator-on-the-intel-pentiumr-4-processor/ for more information.
Definition at line 143 of file random_sample.h.
Member Data Documentation
unsigned int pcl::RandomSample< PointT >::sample_ [protected] |
Number of indices that will be returned.
Definition at line 123 of file random_sample.h.
unsigned int pcl::RandomSample< PointT >::seed_ [protected] |
Random number seed.
Definition at line 125 of file random_sample.h.
The documentation for this class was generated from the following files: