Normal-based feature signature estimation class. Obtains the feature vector by applying Discrete Cosine and Fourier Transforms on an NxM array of real numbers representing the projection distances of the points in the input cloud to a disc around the point of interest. Please consult the following publication for more details: Xinju Li and Igor Guskov Multi-scale features for approximate alignment of point-based surfaces Proceedings of the third Eurographics symposium on Geometry processing July 2005, Vienna, Austria. More...
#include <normal_based_signature.h>
Public Types | |
| typedef boost::shared_ptr < const NormalBasedSignatureEstimation < PointT, PointNT, PointFeature > > | ConstPtr |
| typedef pcl::PointCloud < PointFeature > | FeatureCloud |
| typedef boost::shared_ptr < NormalBasedSignatureEstimation < PointT, PointNT, PointFeature > > | Ptr |
Public Member Functions | |
| size_t | getM () |
| Returns the M parameter - the length of the rows used for the Discrete Cosine Transform. | |
| size_t | getMPrime () |
| Returns the M' parameter - the number of rows to be taken from the matrix of DFT and DCT values that will be contained in the output feature vector. | |
| size_t | getN () |
| Returns the N parameter - the length of the columns used for the Discrete Fourier Transform. | |
| size_t | getNPrime () |
| Returns the N' parameter - the number of rows to be taken from the matrix of DFT and DCT values that will be contained in the output feature vector. | |
| float | getScale () |
| Returns the scale parameter - used to determine the radius of the sampling disc around the point of interest - linked to the smoothing scale of the input cloud. | |
| NormalBasedSignatureEstimation () | |
| Empty constructor, initializes the internal parameters to the default values. | |
| void | setM (size_t m) |
| Setter method for the M parameter - the length of the rows used for the Discrete Cosine Transform. | |
| void | setMPrime (size_t m_prime) |
| Setter method for the M' parameter - the number of rows to be taken from the matrix of DFT and DCT values that will be contained in the output feature vector. | |
| void | setN (size_t n) |
| Setter method for the N parameter - the length of the columns used for the Discrete Fourier Transform. | |
| void | setNPrime (size_t n_prime) |
| Setter method for the N' parameter - the number of columns to be taken from the matrix of DFT and DCT values that will be contained in the output feature vector. | |
| void | setScale (float scale) |
| Setter method for the scale parameter - used to determine the radius of the sampling disc around the point of interest - linked to the smoothing scale of the input cloud. | |
Protected Member Functions | |
| void | computeFeature (FeatureCloud &output) |
| Abstract feature estimation method. | |
Private Attributes | |
| size_t | M_ |
| size_t | M_prime_ |
| size_t | N_ |
| size_t | N_prime_ |
| float | scale_h_ |
Detailed Description
template<typename PointT, typename PointNT, typename PointFeature>
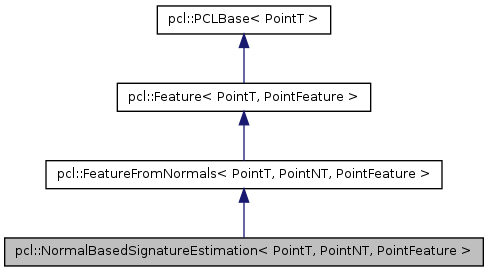
class pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >
Normal-based feature signature estimation class. Obtains the feature vector by applying Discrete Cosine and Fourier Transforms on an NxM array of real numbers representing the projection distances of the points in the input cloud to a disc around the point of interest. Please consult the following publication for more details: Xinju Li and Igor Guskov Multi-scale features for approximate alignment of point-based surfaces Proceedings of the third Eurographics symposium on Geometry processing July 2005, Vienna, Austria.
- Note:
- These features were meant to be used at keypoints detected by a detector using different smoothing radii (e.g., SmoothedSurfacesKeypoint)
Definition at line 61 of file normal_based_signature.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const NormalBasedSignatureEstimation<PointT, PointNT, PointFeature> > pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::ConstPtr |
Reimplemented from pcl::FeatureFromNormals< PointT, PointNT, PointFeature >.
Definition at line 72 of file normal_based_signature.h.
| typedef pcl::PointCloud<PointFeature> pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::FeatureCloud |
Definition at line 70 of file normal_based_signature.h.
| typedef boost::shared_ptr<NormalBasedSignatureEstimation<PointT, PointNT, PointFeature> > pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::Ptr |
Reimplemented from pcl::FeatureFromNormals< PointT, PointNT, PointFeature >.
Definition at line 71 of file normal_based_signature.h.
Constructor & Destructor Documentation
| pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::NormalBasedSignatureEstimation | ( | ) | [inline] |
Empty constructor, initializes the internal parameters to the default values.
Definition at line 78 of file normal_based_signature.h.
Member Function Documentation
| void pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::computeFeature | ( | FeatureCloud & | output | ) | [protected, virtual] |
Abstract feature estimation method.
- Parameters:
-
[out] output the resultant features
Implements pcl::Feature< PointT, PointFeature >.
Definition at line 46 of file normal_based_signature.hpp.
| size_t pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::getM | ( | ) | [inline] |
Returns the M parameter - the length of the rows used for the Discrete Cosine Transform.
Definition at line 106 of file normal_based_signature.h.
| size_t pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::getMPrime | ( | ) | [inline] |
Returns the M' parameter - the number of rows to be taken from the matrix of DFT and DCT values that will be contained in the output feature vector.
- Note:
- This value directly influences the dimensions of the type of output points (PointFeature)
Definition at line 136 of file normal_based_signature.h.
| size_t pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::getN | ( | ) | [inline] |
Returns the N parameter - the length of the columns used for the Discrete Fourier Transform.
Definition at line 96 of file normal_based_signature.h.
| size_t pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::getNPrime | ( | ) | [inline] |
Returns the N' parameter - the number of rows to be taken from the matrix of DFT and DCT values that will be contained in the output feature vector.
- Note:
- This value directly influences the dimensions of the type of output points (PointFeature)
Definition at line 121 of file normal_based_signature.h.
| float pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::getScale | ( | ) | [inline] |
Returns the scale parameter - used to determine the radius of the sampling disc around the point of interest - linked to the smoothing scale of the input cloud.
Definition at line 148 of file normal_based_signature.h.
| void pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::setM | ( | size_t | m | ) | [inline] |
Setter method for the M parameter - the length of the rows used for the Discrete Cosine Transform.
- Parameters:
-
[in] m the length of the rows used for the Discrete Cosine Transform.
Definition at line 102 of file normal_based_signature.h.
| void pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::setMPrime | ( | size_t | m_prime | ) | [inline] |
Setter method for the M' parameter - the number of rows to be taken from the matrix of DFT and DCT values that will be contained in the output feature vector.
- Note:
- This value directly influences the dimensions of the type of output points (PointFeature)
- Parameters:
-
[in] m_prime the number of rows from the matrix of DFT and DCT that will be contained in the output
Definition at line 129 of file normal_based_signature.h.
| void pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::setN | ( | size_t | n | ) | [inline] |
Setter method for the N parameter - the length of the columns used for the Discrete Fourier Transform.
- Parameters:
-
[in] n the length of the columns used for the Discrete Fourier Transform.
Definition at line 92 of file normal_based_signature.h.
| void pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::setNPrime | ( | size_t | n_prime | ) | [inline] |
Setter method for the N' parameter - the number of columns to be taken from the matrix of DFT and DCT values that will be contained in the output feature vector.
- Note:
- This value directly influences the dimensions of the type of output points (PointFeature)
- Parameters:
-
[in] n_prime the number of columns from the matrix of DFT and DCT that will be contained in the output
Definition at line 114 of file normal_based_signature.h.
| void pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::setScale | ( | float | scale | ) | [inline] |
Setter method for the scale parameter - used to determine the radius of the sampling disc around the point of interest - linked to the smoothing scale of the input cloud.
Definition at line 142 of file normal_based_signature.h.
Member Data Documentation
size_t pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::M_ [private] |
Definition at line 157 of file normal_based_signature.h.
size_t pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::M_prime_ [private] |
Definition at line 157 of file normal_based_signature.h.
size_t pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::N_ [private] |
Definition at line 157 of file normal_based_signature.h.
size_t pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::N_prime_ [private] |
Definition at line 157 of file normal_based_signature.h.
float pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature >::scale_h_ [private] |
Definition at line 156 of file normal_based_signature.h.
The documentation for this class was generated from the following files: