#include <SensorData.h>
Detailed Description
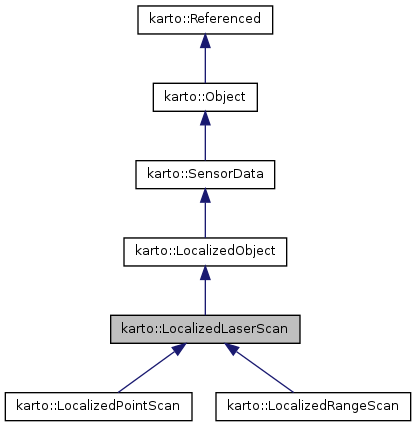
Base class for localized laser scans
Definition at line 567 of file SensorData.h.
Constructor & Destructor Documentation
| karto::LocalizedLaserScan::LocalizedLaserScan | ( | const Identifier & | rSensorIdentifier | ) | [protected] |
Localized laser scan from the given sensor
- Parameters:
-
rSensorIdentifier sensor identifier
Definition at line 107 of file SensorData.cpp.
| karto::LocalizedLaserScan::~LocalizedLaserScan | ( | ) | [protected, virtual] |
Definition at line 113 of file SensorData.cpp.
Member Function Documentation
| virtual void karto::LocalizedLaserScan::ComputePointReadings | ( | ) | [protected, pure virtual] |
Computes point readings in global coordinates
Implemented in karto::LocalizedRangeScan, and karto::LocalizedPointScan.
| const Pose2& karto::LocalizedLaserScan::GetBarycenterPose | ( | ) | const [inline] |
Gets barycenter of point readings
- Returns:
- barycenter of point readings
Definition at line 596 of file SensorData.h.
| const BoundingBox2& karto::LocalizedLaserScan::GetBoundingBox | ( | ) | const [inline] |
Gets the bounding box of this scan
- Returns:
- bounding box of this scan
Definition at line 666 of file SensorData.h.
| virtual const Vector2dList& karto::LocalizedLaserScan::GetFilteredPointReadings | ( | ) | const [inline, protected, virtual] |
Gets filtered points readings
- Returns:
- filtered point readings
Definition at line 724 of file SensorData.h.
| LaserRangeFinder* karto::LocalizedLaserScan::GetLaserRangeFinder | ( | ) | const [inline] |
Gets the laser range finder sensor that generated this scan
- Returns:
- laser range finder sensor of this scan
Definition at line 576 of file SensorData.h.
| kt_size_t karto::LocalizedLaserScan::GetNumberOfRangeReadings | ( | ) | const [inline] |
Gets the number of range readings
- Returns:
- number of range readings
Definition at line 697 of file SensorData.h.
| const Vector2dList & karto::LocalizedLaserScan::GetPointReadings | ( | kt_bool | wantFiltered = false | ) | const |
Gets the point readings of this scan
- Parameters:
-
wantFiltered whether filtered points are to be included or not
- Returns:
- list of point readings
Definition at line 152 of file SensorData.cpp.
| const RangeReadingsList& karto::LocalizedLaserScan::GetRangeReadings | ( | ) | const [inline] |
Gets the range readings of this scan
- Returns:
- range readings of this scan
Definition at line 688 of file SensorData.h.
| Pose2 karto::LocalizedLaserScan::GetReferencePose | ( | kt_bool | useBarycenter | ) | const [inline] |
Gets barycenter if the given parameter is true, otherwise returns the scanner pose
- Parameters:
-
useBarycenter whether to use the barycenter as the reference pose
- Returns:
- barycenter if given parameter is true, otherwise scanner pose
Definition at line 612 of file SensorData.h.
| Pose2 karto::LocalizedLaserScan::GetSensorAt | ( | const Pose2 & | rPose | ) | const [inline] |
Computes the position of the sensor if the robot were at the given pose
- Parameters:
-
rPose hypothesized pose
- Returns:
- sensor pose at the given pose
Definition at line 657 of file SensorData.h.
| Pose2 karto::LocalizedLaserScan::GetSensorPose | ( | ) | const [inline] |
Computes the position of the sensor
- Returns:
- sensor pose
Definition at line 627 of file SensorData.h.
| virtual const Vector2dList& karto::LocalizedLaserScan::GetUnfilteredPointReadings | ( | ) | const [inline, protected, virtual] |
| karto::LocalizedLaserScan::KARTO_RTTI | ( | ) | [private] |
Reimplemented from karto::LocalizedObject.
Reimplemented in karto::LocalizedRangeScan, and karto::LocalizedPointScan.
| virtual void karto::LocalizedLaserScan::SetCorrectedPose | ( | const Pose2 & | rCorrectedPose | ) | [inline, virtual] |
Moves the scan by moving the robot pose to the given location.
- Parameters:
-
rCorrectedPose new pose of the robot of this scan
Reimplemented from karto::LocalizedObject.
Definition at line 585 of file SensorData.h.
| void karto::LocalizedLaserScan::SetSensorPose | ( | const Pose2 & | rSensorPose | ) | [inline] |
Computes the robot pose from the given sensor pose
- Parameters:
-
rSensorPose new pose of the sensor
Definition at line 636 of file SensorData.h.
| void karto::LocalizedLaserScan::Update | ( | ) | [protected] |
Computes the point readings, bounding box, and barycenter of the scan
Definition at line 117 of file SensorData.cpp.
Member Data Documentation
Average of all the point readings
Definition at line 763 of file SensorData.h.
Bounding box of localized range scan
Definition at line 768 of file SensorData.h.
List of filtered point readings
Definition at line 742 of file SensorData.h.
kt_bool karto::LocalizedLaserScan::m_IsDirty [private] |
Internal flag used to update point readings, barycenter and bounding box
Definition at line 773 of file SensorData.h.
List of unfiltered ranges
Definition at line 752 of file SensorData.h.
Name of sensor that created this scan
Reimplemented from karto::SensorData.
Definition at line 758 of file SensorData.h.
List of unfiltered point readings
Definition at line 747 of file SensorData.h.
The documentation for this class was generated from the following files: