#include <chainiksolver_pos_nr_jl_mimic.hpp>
Detailed Description
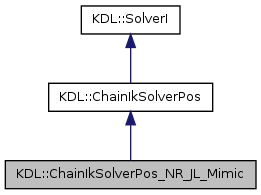
Implementation of a general inverse position kinematics algorithm based on Newton-Raphson iterations to calculate the position transformation from Cartesian to joint space of a general KDL::Chain. Takes joint limits into account.
Definition at line 47 of file chainiksolver_pos_nr_jl_mimic.hpp.
Constructor & Destructor Documentation
| KDL::ChainIkSolverPos_NR_JL_Mimic::ChainIkSolverPos_NR_JL_Mimic | ( | const Chain & | chain, |
| const JntArray & | q_min, | ||
| const JntArray & | q_max, | ||
| ChainFkSolverPos & | fksolver, | ||
| ChainIkSolverVel & | iksolver, | ||
| unsigned int | maxiter = 100, |
||
| double | eps = 1e-6, |
||
| bool | position_ik = false |
||
| ) |
Constructor of the solver, it needs the chain, a forward position kinematics solver and an inverse velocity kinematics solver for that chain.
- Parameters:
-
chain the chain to calculate the inverse position for q_max the maximum joint positions q_min the minimum joint positions fksolver a forward position kinematics solver iksolver an inverse velocity kinematics solver maxiter the maximum Newton-Raphson iterations, default: 100 eps the precision for the position, used to end the iterations, default: epsilon (defined in kdl.hpp)
- Returns:
Definition at line 34 of file chainiksolver_pos_nr_jl_mimic.cpp.
Definition at line 197 of file chainiksolver_pos_nr_jl_mimic.cpp.
Member Function Documentation
| int KDL::ChainIkSolverPos_NR_JL_Mimic::CartToJnt | ( | const JntArray & | q_init, |
| const Frame & | p_in, | ||
| JntArray & | q_out | ||
| ) | [virtual] |
Implements KDL::ChainIkSolverPos.
Definition at line 113 of file chainiksolver_pos_nr_jl_mimic.cpp.
| int KDL::ChainIkSolverPos_NR_JL_Mimic::CartToJntAdvanced | ( | const JntArray & | q_init, |
| const Frame & | p_in, | ||
| JntArray & | q_out, | ||
| bool | lock_redundant_joints | ||
| ) | [virtual] |
Definition at line 118 of file chainiksolver_pos_nr_jl_mimic.cpp.
| void KDL::ChainIkSolverPos_NR_JL_Mimic::qMimicToq | ( | const JntArray & | q, |
| JntArray & | q_result | ||
| ) | [private] |
Definition at line 102 of file chainiksolver_pos_nr_jl_mimic.cpp.
| void KDL::ChainIkSolverPos_NR_JL_Mimic::qToqMimic | ( | const JntArray & | q, |
| JntArray & | q_result | ||
| ) | [private] |
Definition at line 94 of file chainiksolver_pos_nr_jl_mimic.cpp.
| bool KDL::ChainIkSolverPos_NR_JL_Mimic::setMimicJoints | ( | const std::vector< kdl_kinematics_plugin::JointMimic > & | mimic_joints | ) |
Definition at line 68 of file chainiksolver_pos_nr_jl_mimic.cpp.
Member Data Documentation
const Chain KDL::ChainIkSolverPos_NR_JL_Mimic::chain [private] |
Definition at line 78 of file chainiksolver_pos_nr_jl_mimic.hpp.
Definition at line 86 of file chainiksolver_pos_nr_jl_mimic.hpp.
Definition at line 88 of file chainiksolver_pos_nr_jl_mimic.hpp.
double KDL::ChainIkSolverPos_NR_JL_Mimic::eps [private] |
Definition at line 90 of file chainiksolver_pos_nr_jl_mimic.hpp.
Frame KDL::ChainIkSolverPos_NR_JL_Mimic::f [private] |
Definition at line 87 of file chainiksolver_pos_nr_jl_mimic.hpp.
Definition at line 84 of file chainiksolver_pos_nr_jl_mimic.hpp.
Definition at line 85 of file chainiksolver_pos_nr_jl_mimic.hpp.
unsigned int KDL::ChainIkSolverPos_NR_JL_Mimic::maxiter [private] |
Definition at line 89 of file chainiksolver_pos_nr_jl_mimic.hpp.
std::vector<kdl_kinematics_plugin::JointMimic> KDL::ChainIkSolverPos_NR_JL_Mimic::mimic_joints [private] |
Definition at line 91 of file chainiksolver_pos_nr_jl_mimic.hpp.
bool KDL::ChainIkSolverPos_NR_JL_Mimic::position_ik [private] |
Definition at line 94 of file chainiksolver_pos_nr_jl_mimic.hpp.
Definition at line 81 of file chainiksolver_pos_nr_jl_mimic.hpp.
Definition at line 82 of file chainiksolver_pos_nr_jl_mimic.hpp.
Definition at line 79 of file chainiksolver_pos_nr_jl_mimic.hpp.
Definition at line 80 of file chainiksolver_pos_nr_jl_mimic.hpp.
Definition at line 83 of file chainiksolver_pos_nr_jl_mimic.hpp.
The documentation for this class was generated from the following files: