#include <ros/ros.h>#include "kurt3d/ServoCommand.h"#include "kurt3d/Scan.h"#include <sensor_msgs/LaserScan.h>#include <laser_assembler/AssembleScans2.h>#include <cstdlib>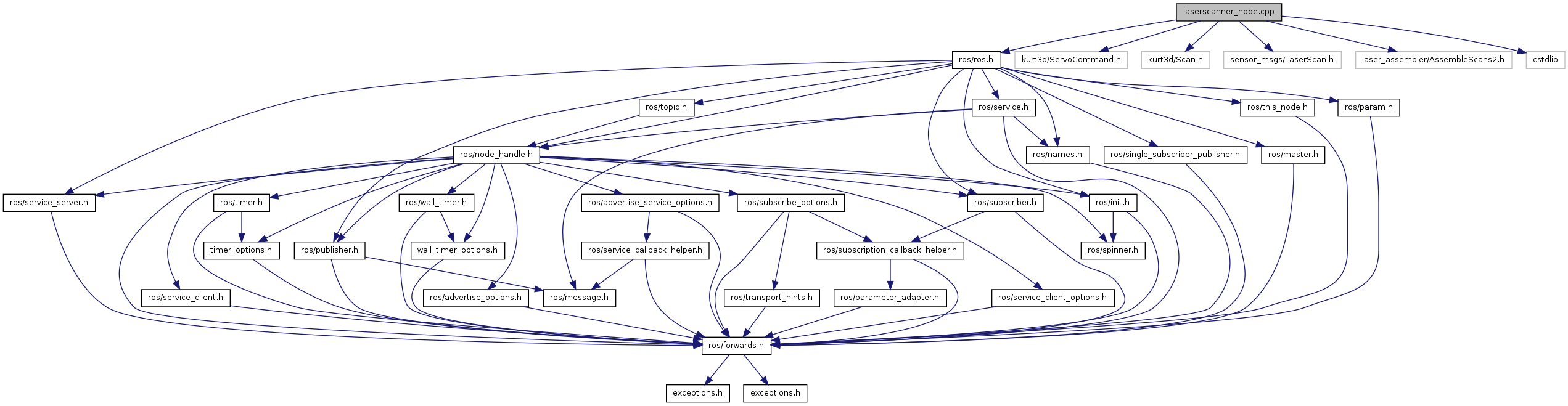
Go to the source code of this file.
Defines | |
| #define | _USE_MATH_DEFINES |
| #define | MAX_POS ((-60.0 * (float)M_PI) / 180.0) |
| #define | MIN_POS ((50.0 * (float)M_PI) / 180.0) |
| #define | RANGE 1000 |
| #define | STANDBY_POS ((20.0 * (float)M_PI) / 180.0) |
Functions | |
| int | main (int argc, char **argv) |
| bool | scan (kurt3d::Scan::Request &req, kurt3d::Scan::Response &res) |
| void | scanCallback (const sensor_msgs::LaserScan::ConstPtr &msg) |
Variables | |
| static ros::ServiceClient | client |
| static sensor_msgs::LaserScan | currentScan |
| static ros::Publisher | laser_pub |
| static sensor_msgs::LaserScan | lastPublishedScan |
| static sensor_msgs::LaserScan | lastScan |
| static ros::ServiceClient | pointCloudClient |
| static ros::Publisher | state_pub |
Define Documentation
| #define _USE_MATH_DEFINES |
Definition at line 36 of file laserscanner_node.cpp.
| #define MAX_POS ((-60.0 * (float)M_PI) / 180.0) |
Definition at line 41 of file laserscanner_node.cpp.
| #define MIN_POS ((50.0 * (float)M_PI) / 180.0) |
Definition at line 39 of file laserscanner_node.cpp.
| #define RANGE 1000 |
Definition at line 42 of file laserscanner_node.cpp.
| #define STANDBY_POS ((20.0 * (float)M_PI) / 180.0) |
Definition at line 40 of file laserscanner_node.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 165 of file laserscanner_node.cpp.
| bool scan | ( | kurt3d::Scan::Request & | req, |
| kurt3d::Scan::Response & | res | ||
| ) |
Definition at line 62 of file laserscanner_node.cpp.
| void scanCallback | ( | const sensor_msgs::LaserScan::ConstPtr & | msg | ) |
Definition at line 55 of file laserscanner_node.cpp.
Variable Documentation
ros::ServiceClient client [static] |
Definition at line 44 of file laserscanner_node.cpp.
sensor_msgs::LaserScan currentScan [static] |
Definition at line 52 of file laserscanner_node.cpp.
ros::Publisher laser_pub [static] |
Definition at line 48 of file laserscanner_node.cpp.
sensor_msgs::LaserScan lastPublishedScan [static] |
Definition at line 50 of file laserscanner_node.cpp.
sensor_msgs::LaserScan lastScan [static] |
Definition at line 53 of file laserscanner_node.cpp.
ros::ServiceClient pointCloudClient [static] |
Definition at line 45 of file laserscanner_node.cpp.
ros::Publisher state_pub [static] |
Definition at line 47 of file laserscanner_node.cpp.