#include <heightmap_time_accumulation.h>
Public Types | |
| typedef boost::shared_ptr < HeightmapTimeAccumulation > | Ptr |
Public Member Functions | |
| HeightmapTimeAccumulation () | |
Protected Member Functions | |
| virtual void | accumulate (const sensor_msgs::Image::ConstPtr &new_heightmap) |
| virtual void | configCallback (const jsk_recognition_msgs::HeightmapConfig::ConstPtr &config) |
| virtual bool | isValidCell (const cv::Point &index, const cv::Mat &map) |
| virtual bool | isValidIndex (const cv::Point &index, const cv::Mat &map) |
| virtual void | onInit () |
| virtual void | prevPointCloud (const sensor_msgs::PointCloud2::ConstPtr &msg) |
| virtual void | publishHeightmap (const cv::Mat &heightmap, const std_msgs::Header &header) |
| virtual bool | resetCallback (std_srvs::Empty::Request &req, std_srvs::Empty::Response &res) |
| virtual void | subscribe () |
| virtual cv::Point | toIndex (const pcl::PointXYZ &p, const cv::Mat &map) |
| virtual void | unsubscribe () |
Protected Attributes | |
| cv::Mat | accumulated_heightmap_ |
| std::string | center_frame_id_ |
| jsk_recognition_msgs::HeightmapConfig::ConstPtr | config_ |
| std::string | fixed_frame_id_ |
| double | max_x_ |
| double | max_y_ |
| double | min_x_ |
| double | min_y_ |
| boost::mutex | mutex_ |
| pcl::PointCloud< pcl::PointXYZ > | prev_cloud_ |
| Eigen::Affine3f | prev_from_center_to_fixed_ |
| ros::Publisher | pub_config_ |
| ros::Publisher | pub_output_ |
| ros::ServiceServer | srv_reset_ |
| ros::Subscriber | sub_config_ |
| message_filters::Subscriber < sensor_msgs::Image > | sub_heightmap_ |
| ros::Subscriber | sub_previous_pointcloud_ |
| tf::TransformListener * | tf_ |
| boost::shared_ptr < tf::MessageFilter < sensor_msgs::Image > > | tf_filter_ |
| int | tf_queue_size_ |
Detailed Description
Definition at line 54 of file heightmap_time_accumulation.h.
Member Typedef Documentation
| typedef boost::shared_ptr<HeightmapTimeAccumulation> jsk_pcl_ros::HeightmapTimeAccumulation::Ptr |
Definition at line 58 of file heightmap_time_accumulation.h.
Constructor & Destructor Documentation
Definition at line 59 of file heightmap_time_accumulation.h.
Member Function Documentation
| void jsk_pcl_ros::HeightmapTimeAccumulation::accumulate | ( | const sensor_msgs::Image::ConstPtr & | new_heightmap | ) | [protected, virtual] |
Definition at line 128 of file heightmap_time_accumulation_nodelet.cpp.
| void jsk_pcl_ros::HeightmapTimeAccumulation::configCallback | ( | const jsk_recognition_msgs::HeightmapConfig::ConstPtr & | config | ) | [protected, virtual] |
Definition at line 172 of file heightmap_time_accumulation_nodelet.cpp.
| bool jsk_pcl_ros::HeightmapTimeAccumulation::isValidCell | ( | const cv::Point & | index, |
| const cv::Mat & | map | ||
| ) | [protected, virtual] |
Definition at line 122 of file heightmap_time_accumulation_nodelet.cpp.
| bool jsk_pcl_ros::HeightmapTimeAccumulation::isValidIndex | ( | const cv::Point & | index, |
| const cv::Mat & | map | ||
| ) | [protected, virtual] |
Definition at line 116 of file heightmap_time_accumulation_nodelet.cpp.
| void jsk_pcl_ros::HeightmapTimeAccumulation::onInit | ( | void | ) | [protected, virtual] |
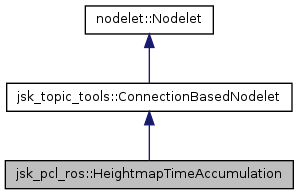
Reimplemented from jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 46 of file heightmap_time_accumulation_nodelet.cpp.
| void jsk_pcl_ros::HeightmapTimeAccumulation::prevPointCloud | ( | const sensor_msgs::PointCloud2::ConstPtr & | msg | ) | [protected, virtual] |
Definition at line 164 of file heightmap_time_accumulation_nodelet.cpp.
| void jsk_pcl_ros::HeightmapTimeAccumulation::publishHeightmap | ( | const cv::Mat & | heightmap, |
| const std_msgs::Header & | header | ||
| ) | [protected, virtual] |
Definition at line 92 of file heightmap_time_accumulation_nodelet.cpp.
| bool jsk_pcl_ros::HeightmapTimeAccumulation::resetCallback | ( | std_srvs::Empty::Request & | req, |
| std_srvs::Empty::Response & | res | ||
| ) | [protected, virtual] |
Definition at line 184 of file heightmap_time_accumulation_nodelet.cpp.
| void jsk_pcl_ros::HeightmapTimeAccumulation::subscribe | ( | ) | [protected, virtual] |
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 82 of file heightmap_time_accumulation_nodelet.cpp.
| cv::Point jsk_pcl_ros::HeightmapTimeAccumulation::toIndex | ( | const pcl::PointXYZ & | p, |
| const cv::Mat & | map | ||
| ) | [protected, virtual] |
Definition at line 101 of file heightmap_time_accumulation_nodelet.cpp.
| void jsk_pcl_ros::HeightmapTimeAccumulation::unsubscribe | ( | ) | [protected, virtual] |
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 86 of file heightmap_time_accumulation_nodelet.cpp.
Member Data Documentation
cv::Mat jsk_pcl_ros::HeightmapTimeAccumulation::accumulated_heightmap_ [protected] |
Definition at line 83 of file heightmap_time_accumulation.h.
Definition at line 81 of file heightmap_time_accumulation.h.
jsk_recognition_msgs::HeightmapConfig::ConstPtr jsk_pcl_ros::HeightmapTimeAccumulation::config_ [protected] |
Definition at line 92 of file heightmap_time_accumulation.h.
Definition at line 82 of file heightmap_time_accumulation.h.
double jsk_pcl_ros::HeightmapTimeAccumulation::max_x_ [protected] |
Definition at line 95 of file heightmap_time_accumulation.h.
double jsk_pcl_ros::HeightmapTimeAccumulation::max_y_ [protected] |
Definition at line 96 of file heightmap_time_accumulation.h.
double jsk_pcl_ros::HeightmapTimeAccumulation::min_x_ [protected] |
Definition at line 93 of file heightmap_time_accumulation.h.
double jsk_pcl_ros::HeightmapTimeAccumulation::min_y_ [protected] |
Definition at line 94 of file heightmap_time_accumulation.h.
Definition at line 78 of file heightmap_time_accumulation.h.
pcl::PointCloud<pcl::PointXYZ> jsk_pcl_ros::HeightmapTimeAccumulation::prev_cloud_ [protected] |
Definition at line 91 of file heightmap_time_accumulation.h.
Eigen::Affine3f jsk_pcl_ros::HeightmapTimeAccumulation::prev_from_center_to_fixed_ [protected] |
Definition at line 80 of file heightmap_time_accumulation.h.
Definition at line 85 of file heightmap_time_accumulation.h.
Definition at line 84 of file heightmap_time_accumulation.h.
Definition at line 86 of file heightmap_time_accumulation.h.
Definition at line 90 of file heightmap_time_accumulation.h.
message_filters::Subscriber<sensor_msgs::Image> jsk_pcl_ros::HeightmapTimeAccumulation::sub_heightmap_ [protected] |
Definition at line 88 of file heightmap_time_accumulation.h.
Definition at line 89 of file heightmap_time_accumulation.h.
Definition at line 79 of file heightmap_time_accumulation.h.
boost::shared_ptr<tf::MessageFilter<sensor_msgs::Image> > jsk_pcl_ros::HeightmapTimeAccumulation::tf_filter_ [protected] |
Definition at line 87 of file heightmap_time_accumulation.h.
int jsk_pcl_ros::HeightmapTimeAccumulation::tf_queue_size_ [protected] |
Definition at line 97 of file heightmap_time_accumulation.h.
The documentation for this class was generated from the following files: