#include <cluster_point_indices_decomposer.h>
Public Types | |
| typedef message_filters::sync_policies::ExactTime < sensor_msgs::PointCloud2, jsk_recognition_msgs::ClusterPointIndices, jsk_recognition_msgs::PolygonArray, jsk_recognition_msgs::ModelCoefficientsArray > | SyncAlignPolicy |
| typedef message_filters::sync_policies::ExactTime < sensor_msgs::PointCloud2, jsk_recognition_msgs::ClusterPointIndices > | SyncPolicy |
Public Member Functions | |
| ClusterPointIndicesDecomposer () | |
| virtual void | extract (const sensor_msgs::PointCloud2ConstPtr &point, const jsk_recognition_msgs::ClusterPointIndicesConstPtr &indices, const jsk_recognition_msgs::PolygonArrayConstPtr &planes, const jsk_recognition_msgs::ModelCoefficientsArrayConstPtr &coefficients) |
| virtual void | extract (const sensor_msgs::PointCloud2ConstPtr &point, const jsk_recognition_msgs::ClusterPointIndicesConstPtr &indices) |
| virtual void | onInit () |
| virtual void | sortIndicesOrder (pcl::PointCloud< pcl::PointXYZ >::Ptr input, std::vector< pcl::IndicesPtr > indices_array, std::vector< pcl::IndicesPtr > &output_array) |
Protected Member Functions | |
| void | addToDebugPointCloud (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr segmented_cloud, size_t i, pcl::PointCloud< pcl::PointXYZRGB > &debug_output) |
| virtual void | allocatePublishers (size_t num) |
| virtual bool | computeBoundingBox (const pcl::PointCloud< pcl::PointXYZRGB >::Ptr segmented_cloud, const std_msgs::Header header, const Eigen::Vector4f center, const jsk_recognition_msgs::PolygonArrayConstPtr &planes, const jsk_recognition_msgs::ModelCoefficientsArrayConstPtr &coefficients, jsk_recognition_msgs::BoundingBox &bounding_box) |
| virtual int | findNearestPlane (const Eigen::Vector4f ¢er, const jsk_recognition_msgs::PolygonArrayConstPtr &planes, const jsk_recognition_msgs::ModelCoefficientsArrayConstPtr &coefficients) |
| virtual void | subscribe () |
| virtual void | unsubscribe () |
| virtual void | updateDiagnostic (diagnostic_updater::DiagnosticStatusWrapper &stat) |
Static Protected Member Functions | |
| static uint32_t | colorRGBAToUInt32 (std_msgs::ColorRGBA c) |
Protected Attributes | |
| bool | align_boxes_ |
| ros::Publisher | box_pub_ |
| tf::TransformBroadcaster | br_ |
| Counter | cluster_counter_ |
| bool | force_to_flip_z_axis_ |
| ros::Publisher | pc_pub_ |
| bool | publish_clouds_ |
| bool | publish_tf_ |
| std::vector< ros::Publisher > | publishers_ |
| message_filters::Subscriber < jsk_recognition_msgs::ModelCoefficientsArray > | sub_coefficients_ |
| message_filters::Subscriber < sensor_msgs::PointCloud2 > | sub_input_ |
| message_filters::Subscriber < jsk_recognition_msgs::PolygonArray > | sub_polygons_ |
| message_filters::Subscriber < jsk_recognition_msgs::ClusterPointIndices > | sub_target_ |
| boost::shared_ptr < message_filters::Synchronizer < SyncPolicy > > | sync_ |
| boost::shared_ptr < message_filters::Synchronizer < SyncAlignPolicy > > | sync_align_ |
| std::string | tf_prefix_ |
| bool | use_pca_ |
Detailed Description
Definition at line 65 of file cluster_point_indices_decomposer.h.
Member Typedef Documentation
| typedef message_filters::sync_policies::ExactTime< sensor_msgs::PointCloud2, jsk_recognition_msgs::ClusterPointIndices, jsk_recognition_msgs::PolygonArray, jsk_recognition_msgs::ModelCoefficientsArray> jsk_pcl_ros::ClusterPointIndicesDecomposer::SyncAlignPolicy |
Definition at line 76 of file cluster_point_indices_decomposer.h.
| typedef message_filters::sync_policies::ExactTime< sensor_msgs::PointCloud2, jsk_recognition_msgs::ClusterPointIndices > jsk_pcl_ros::ClusterPointIndicesDecomposer::SyncPolicy |
Definition at line 71 of file cluster_point_indices_decomposer.h.
Constructor & Destructor Documentation
Definition at line 68 of file cluster_point_indices_decomposer.h.
Member Function Documentation
| void jsk_pcl_ros::ClusterPointIndicesDecomposer::addToDebugPointCloud | ( | const pcl::PointCloud< pcl::PointXYZRGB >::Ptr | segmented_cloud, |
| size_t | i, | ||
| pcl::PointCloud< pcl::PointXYZRGB > & | debug_output | ||
| ) | [protected] |
Definition at line 289 of file cluster_point_indices_decomposer_nodelet.cpp.
| void jsk_pcl_ros::ClusterPointIndicesDecomposer::allocatePublishers | ( | size_t | num | ) | [protected, virtual] |
Definition at line 390 of file cluster_point_indices_decomposer_nodelet.cpp.
| static uint32_t jsk_pcl_ros::ClusterPointIndicesDecomposer::colorRGBAToUInt32 | ( | std_msgs::ColorRGBA | c | ) | [inline, static, protected] |
Definition at line 113 of file cluster_point_indices_decomposer.h.
| bool jsk_pcl_ros::ClusterPointIndicesDecomposer::computeBoundingBox | ( | const pcl::PointCloud< pcl::PointXYZRGB >::Ptr | segmented_cloud, |
| const std_msgs::Header | header, | ||
| const Eigen::Vector4f | center, | ||
| const jsk_recognition_msgs::PolygonArrayConstPtr & | planes, | ||
| const jsk_recognition_msgs::ModelCoefficientsArrayConstPtr & | coefficients, | ||
| jsk_recognition_msgs::BoundingBox & | bounding_box | ||
| ) | [protected, virtual] |
Definition at line 165 of file cluster_point_indices_decomposer_nodelet.cpp.
| void jsk_pcl_ros::ClusterPointIndicesDecomposer::extract | ( | const sensor_msgs::PointCloud2ConstPtr & | point, |
| const jsk_recognition_msgs::ClusterPointIndicesConstPtr & | indices, | ||
| const jsk_recognition_msgs::PolygonArrayConstPtr & | planes, | ||
| const jsk_recognition_msgs::ModelCoefficientsArrayConstPtr & | coefficients | ||
| ) | [virtual] |
Definition at line 305 of file cluster_point_indices_decomposer_nodelet.cpp.
| void jsk_pcl_ros::ClusterPointIndicesDecomposer::extract | ( | const sensor_msgs::PointCloud2ConstPtr & | point, |
| const jsk_recognition_msgs::ClusterPointIndicesConstPtr & | indices | ||
| ) | [virtual] |
Definition at line 382 of file cluster_point_indices_decomposer_nodelet.cpp.
| int jsk_pcl_ros::ClusterPointIndicesDecomposer::findNearestPlane | ( | const Eigen::Vector4f & | center, |
| const jsk_recognition_msgs::PolygonArrayConstPtr & | planes, | ||
| const jsk_recognition_msgs::ModelCoefficientsArrayConstPtr & | coefficients | ||
| ) | [protected, virtual] |
Definition at line 137 of file cluster_point_indices_decomposer_nodelet.cpp.
| void jsk_pcl_ros::ClusterPointIndicesDecomposer::onInit | ( | void | ) | [virtual] |
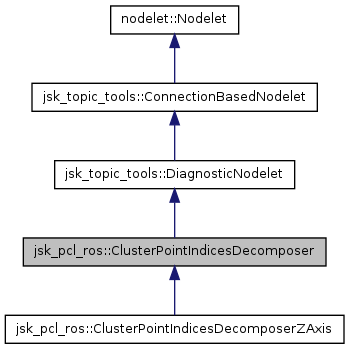
Reimplemented from jsk_topic_tools::DiagnosticNodelet.
Definition at line 54 of file cluster_point_indices_decomposer_nodelet.cpp.
| void jsk_pcl_ros::ClusterPointIndicesDecomposer::sortIndicesOrder | ( | pcl::PointCloud< pcl::PointXYZ >::Ptr | input, |
| std::vector< pcl::IndicesPtr > | indices_array, | ||
| std::vector< pcl::IndicesPtr > & | output_array | ||
| ) | [virtual] |
Reimplemented in jsk_pcl_ros::ClusterPointIndicesDecomposerZAxis.
Definition at line 103 of file cluster_point_indices_decomposer_nodelet.cpp.
| void jsk_pcl_ros::ClusterPointIndicesDecomposer::subscribe | ( | ) | [protected, virtual] |
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 74 of file cluster_point_indices_decomposer_nodelet.cpp.
| void jsk_pcl_ros::ClusterPointIndicesDecomposer::unsubscribe | ( | ) | [protected, virtual] |
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 92 of file cluster_point_indices_decomposer_nodelet.cpp.
| void jsk_pcl_ros::ClusterPointIndicesDecomposer::updateDiagnostic | ( | diagnostic_updater::DiagnosticStatusWrapper & | stat | ) | [protected, virtual] |
Reimplemented from jsk_topic_tools::DiagnosticNodelet.
Definition at line 114 of file cluster_point_indices_decomposer_nodelet.cpp.
Member Data Documentation
bool jsk_pcl_ros::ClusterPointIndicesDecomposer::align_boxes_ [protected] |
Definition at line 136 of file cluster_point_indices_decomposer.h.
Definition at line 129 of file cluster_point_indices_decomposer.h.
Definition at line 130 of file cluster_point_indices_decomposer.h.
Definition at line 139 of file cluster_point_indices_decomposer.h.
bool jsk_pcl_ros::ClusterPointIndicesDecomposer::force_to_flip_z_axis_ [protected] |
Definition at line 133 of file cluster_point_indices_decomposer.h.
Definition at line 129 of file cluster_point_indices_decomposer.h.
bool jsk_pcl_ros::ClusterPointIndicesDecomposer::publish_clouds_ [protected] |
Definition at line 134 of file cluster_point_indices_decomposer.h.
bool jsk_pcl_ros::ClusterPointIndicesDecomposer::publish_tf_ [protected] |
Definition at line 135 of file cluster_point_indices_decomposer.h.
Reimplemented from jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 128 of file cluster_point_indices_decomposer.h.
message_filters::Subscriber<jsk_recognition_msgs::ModelCoefficientsArray> jsk_pcl_ros::ClusterPointIndicesDecomposer::sub_coefficients_ [protected] |
Definition at line 125 of file cluster_point_indices_decomposer.h.
message_filters::Subscriber<sensor_msgs::PointCloud2> jsk_pcl_ros::ClusterPointIndicesDecomposer::sub_input_ [protected] |
Definition at line 122 of file cluster_point_indices_decomposer.h.
message_filters::Subscriber<jsk_recognition_msgs::PolygonArray> jsk_pcl_ros::ClusterPointIndicesDecomposer::sub_polygons_ [protected] |
Definition at line 124 of file cluster_point_indices_decomposer.h.
message_filters::Subscriber<jsk_recognition_msgs::ClusterPointIndices> jsk_pcl_ros::ClusterPointIndicesDecomposer::sub_target_ [protected] |
Definition at line 123 of file cluster_point_indices_decomposer.h.
boost::shared_ptr<message_filters::Synchronizer<SyncPolicy> > jsk_pcl_ros::ClusterPointIndicesDecomposer::sync_ [protected] |
Definition at line 126 of file cluster_point_indices_decomposer.h.
boost::shared_ptr<message_filters::Synchronizer<SyncAlignPolicy> > jsk_pcl_ros::ClusterPointIndicesDecomposer::sync_align_ [protected] |
Definition at line 127 of file cluster_point_indices_decomposer.h.
Definition at line 131 of file cluster_point_indices_decomposer.h.
bool jsk_pcl_ros::ClusterPointIndicesDecomposer::use_pca_ [protected] |
Definition at line 137 of file cluster_point_indices_decomposer.h.
The documentation for this class was generated from the following files: