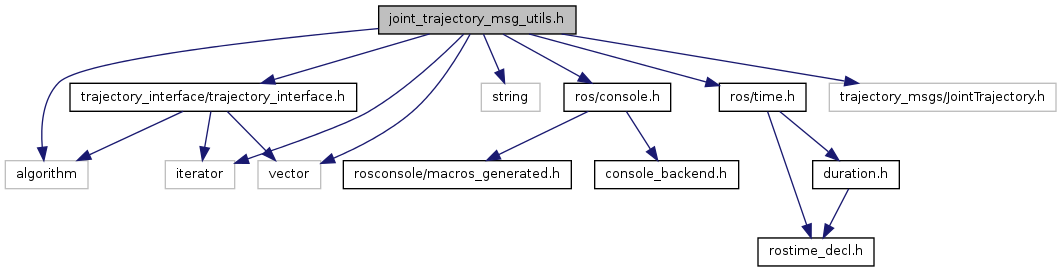
#include <algorithm>#include <iterator>#include <string>#include <vector>#include <ros/console.h>#include <ros/time.h>#include <trajectory_msgs/JointTrajectory.h>#include <trajectory_interface/trajectory_interface.h>
Include dependency graph for joint_trajectory_msg_utils.h:
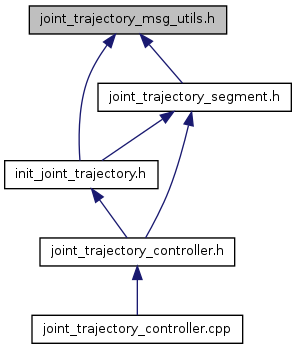
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | joint_trajectory_controller::internal::IsBeforePoint |
Namespaces | |
| namespace | joint_trajectory_controller |
| namespace | joint_trajectory_controller::internal |
Functions | |
| std::vector < trajectory_msgs::JointTrajectoryPoint > ::const_iterator | joint_trajectory_controller::findPoint (const trajectory_msgs::JointTrajectory &msg, const ros::Time &time) |
Find an iterator to the trajectory point with the greatest start time < time. | |
| bool | joint_trajectory_controller::isTimeStrictlyIncreasing (const trajectory_msgs::JointTrajectory &msg) |
| bool | joint_trajectory_controller::isValid (const trajectory_msgs::JointTrajectoryPoint &point, const unsigned int joint_dim) |
| bool | joint_trajectory_controller::isValid (const trajectory_msgs::JointTrajectory &msg) |
| ros::Time | joint_trajectory_controller::internal::startTime (const trajectory_msgs::JointTrajectory &msg, const ros::Time &time) |