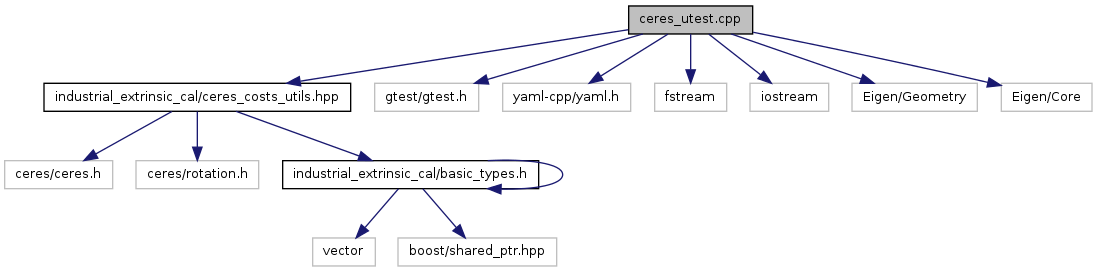
#include <industrial_extrinsic_cal/ceres_costs_utils.hpp>#include <gtest/gtest.h>#include <yaml-cpp/yaml.h>#include <fstream>#include <iostream>#include <Eigen/Geometry>#include <Eigen/Core>
Include dependency graph for ceres_utest.cpp:
Go to the source code of this file.
Classes | |
| struct | PointReprjErrorNoDistortion |
Functions | |
| TEST (IndustrialExtrinsicCalCeresSuite, create_points) | |
| TEST (IndustrialExtrinsicCalCeresSuite, points_costfunction) | |
| Point3d | transformPoint (Point3d &original_point, double &ax, double &ay, double &az, double &x, double &y, double &z) |
Variables | |
| double | aa [3] |
| std::vector< Point3d > | created_points |
| double | p [3] |
| std::vector< Point3d > | transformed_points |
Function Documentation
| TEST | ( | IndustrialExtrinsicCalCeresSuite | , |
| create_points | |||
| ) |
Definition at line 110 of file ceres_utest.cpp.
| TEST | ( | IndustrialExtrinsicCalCeresSuite | , |
| points_costfunction | |||
| ) |
Definition at line 171 of file ceres_utest.cpp.
| Point3d transformPoint | ( | Point3d & | original_point, |
| double & | ax, | ||
| double & | ay, | ||
| double & | az, | ||
| double & | x, | ||
| double & | y, | ||
| double & | z | ||
| ) |
Variable Documentation
| double aa[3] |
Definition at line 35 of file ceres_utest.cpp.
| std::vector<Point3d> created_points |
Definition at line 34 of file ceres_utest.cpp.
| double p[3] |
Definition at line 36 of file ceres_utest.cpp.
| std::vector<Point3d> transformed_points |
Definition at line 37 of file ceres_utest.cpp.