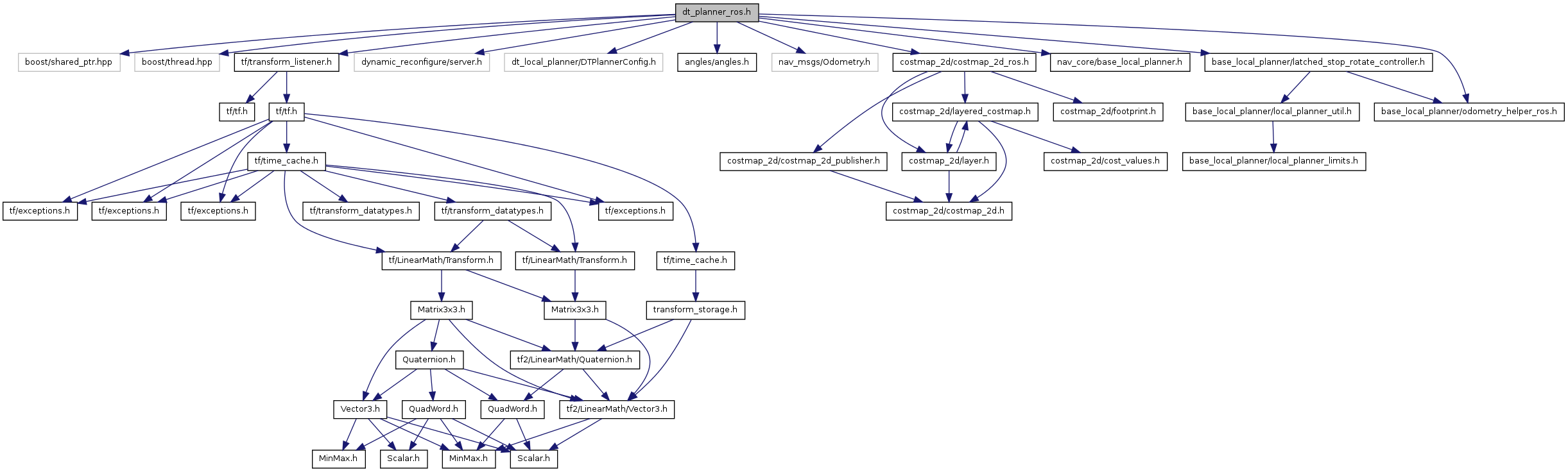
#include <boost/shared_ptr.hpp>#include <boost/thread.hpp>#include <tf/transform_listener.h>#include <dynamic_reconfigure/server.h>#include <dt_local_planner/DTPlannerConfig.h>#include <angles/angles.h>#include <nav_msgs/Odometry.h>#include <costmap_2d/costmap_2d_ros.h>#include <nav_core/base_local_planner.h>#include <base_local_planner/latched_stop_rotate_controller.h>#include <base_local_planner/odometry_helper_ros.h>
Include dependency graph for dt_planner_ros.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | dt_local_planner::DTPlannerROS |
| ROS Wrapper for the AckermannPlanner that adheres to the BaseLocalPlanner interface and can be used as a plugin for move_base. More... | |
Namespaces | |
| namespace | dt_local_planner |
Defines | |
| #define | BOOST_SIGNALS_NO_DEPRECATION_WARNING |
Functions | |
| double | dt_local_planner::dist (geometry_msgs::PoseStamped &start, geometry_msgs::PoseStamped &end) |
| compute the distance between two points | |
| bool | dt_local_planner::isForwards (geometry_msgs::PoseStamped &start, geometry_msgs::PoseStamped &end) |
| determine if one point is forward or backwards from another | |
Define Documentation
Definition at line 41 of file dt_planner_ros.h.