Cartesian Trajectory Point used to describe a Cartesian goal for a robot trajectory. More...
#include <cart_trajectory_pt.h>
Public Member Functions | |
| CartTrajectoryPt (const descartes_core::TimingConstraint &timing=descartes_core::TimingConstraint()) | |
| Default cartesian trajectory point constructor. All frames initialized to Identity. | |
| CartTrajectoryPt (const descartes_core::Frame &wobj_base, const TolerancedFrame &wobj_pt, const descartes_core::Frame &tool_base, const TolerancedFrame &tool_pt, double pos_increment, double orient_increment, const descartes_core::TimingConstraint &timing=descartes_core::TimingConstraint()) | |
| Full constructor of cartesian trajectory point. | |
| CartTrajectoryPt (const TolerancedFrame &wobj_pt, double pos_increment, double orient_increment, const descartes_core::TimingConstraint &timing=descartes_core::TimingConstraint()) | |
| Partial constructor of cartesian trajectory point (all frames not specified by parameters are initialized to Identity). This constructor should be utilized to specify the robot tip (toleranced) point relative to the robot base. | |
| CartTrajectoryPt (const descartes_core::Frame &wobj_pt, const descartes_core::TimingConstraint &timing=descartes_core::TimingConstraint()) | |
| Partial constructor of cartesian trajectory point (all frames not specified by parameters are initialized to Identity). This constructor should be utilized to specify the robot tip (NOT toleranced) point relative to the robot base. | |
| virtual descartes_core::TrajectoryPtPtr | copy () const |
| virtual bool | isValid (const descartes_core::RobotModel &model) const |
| virtual bool | setDiscretization (const std::vector< double > &discretization) |
| Set discretization. Cartesian points can have position and angular discretization. | |
| void | setTool (const descartes_core::Frame &base, const TolerancedFrame &pt) |
| void | setWobj (const descartes_core::Frame &base, const TolerancedFrame &pt) |
| virtual | ~CartTrajectoryPt () |
Getters for Cartesian pose(s) | |
| virtual bool | getClosestCartPose (const std::vector< double > &seed_state, const descartes_core::RobotModel &model, Eigen::Affine3d &pose) const |
| virtual bool | getNominalCartPose (const std::vector< double > &seed_state, const descartes_core::RobotModel &model, Eigen::Affine3d &pose) const |
| virtual void | getCartesianPoses (const descartes_core::RobotModel &model, EigenSTL::vector_Affine3d &poses) const |
Getters for joint pose(s) | |
| virtual bool | getClosestJointPose (const std::vector< double > &seed_state, const descartes_core::RobotModel &model, std::vector< double > &joint_pose) const |
| virtual bool | getNominalJointPose (const std::vector< double > &seed_state, const descartes_core::RobotModel &model, std::vector< double > &joint_pose) const |
| virtual void | getJointPoses (const descartes_core::RobotModel &model, std::vector< std::vector< double > > &joint_poses) const |
Public Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | |
Protected Member Functions | |
| bool | computeCartesianPoses (EigenSTL::vector_Affine3d &poses) const |
Protected Attributes | |
| double | orient_increment_ |
| Sampling discretization in angular orientation. | |
| double | pos_increment_ |
| Sampling discretization in cartesian directions. | |
| descartes_core::Frame | tool_base_ |
| Fixed transform from wrist/tool_plate to tool base. | |
| TolerancedFrame | tool_pt_ |
| Underconstrained transform from tool_base to effective pt on tool. | |
| descartes_core::Frame | wobj_base_ |
| Fixed transform from WCS to base of object. | |
| TolerancedFrame | wobj_pt_ |
| Underconstrained transform from object base to goal point on object. | |
Detailed Description
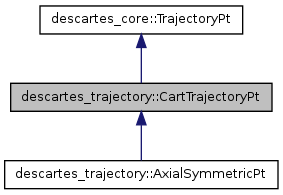
Cartesian Trajectory Point used to describe a Cartesian goal for a robot trajectory.
Background: For a general robotic process, TOOL pose can be variable (e.g. robot holding workpiece) or fixed (e.g. robot holding MIG torch). Similarly, the WORKOBJECT pose can be variable (e.g. robot riveting a workpiece) or fixed (e.g. stationary grinder that robot moves a tool against).
For a CartTrajectoryPt, TOOL pose is described by fixed transform from wrist to TOOL_BASE, and variable transform from TOOL_BASE to TOOL_PT. This allows the tolerances on tool pose to be easily expressed in a local tool frame. Similarly, WOBJ is located relative to world coordinate system, and is described by fixed transform from world to WOBJ_BASE, and variable transform from WOBJ_BASE to specific point on part (WOBJ_PT). Variable transforms of both TOOL and WOBJ have tolerances on both position and orientation. Optionally, additional constraints can be placed on position and orientation that can limit, but not expand, existing tolerances.
The get*Pose methods of CartTrajectoryPt try to set joint positions of a robot such that tool_pt_ is coincident with wobj_pt_.
Definition at line 203 of file cart_trajectory_pt.h.
Constructor & Destructor Documentation
| descartes_trajectory::CartTrajectoryPt::CartTrajectoryPt | ( | const descartes_core::TimingConstraint & | timing = descartes_core::TimingConstraint() | ) |
Default cartesian trajectory point constructor. All frames initialized to Identity.
Definition at line 155 of file src/cart_trajectory_pt.cpp.
| descartes_trajectory::CartTrajectoryPt::CartTrajectoryPt | ( | const descartes_core::Frame & | wobj_base, |
| const TolerancedFrame & | wobj_pt, | ||
| const descartes_core::Frame & | tool_base, | ||
| const TolerancedFrame & | tool_pt, | ||
| double | pos_increment, | ||
| double | orient_increment, | ||
| const descartes_core::TimingConstraint & | timing = descartes_core::TimingConstraint() |
||
| ) |
Full constructor of cartesian trajectory point.
- Parameters:
-
wobj_base Fixed transform from WCS to base of object wobj_pt Underconstrained transform from object base to goal point on object. tool_base Fixed transform from wrist/tool_plate to tool base tool_pt Underconstrained transform from tool_base to effective pt on tool. pos_increment Position increment used for sampling pos_increment Orientation increment used for sampling
Definition at line 165 of file src/cart_trajectory_pt.cpp.
| descartes_trajectory::CartTrajectoryPt::CartTrajectoryPt | ( | const TolerancedFrame & | wobj_pt, |
| double | pos_increment, | ||
| double | orient_increment, | ||
| const descartes_core::TimingConstraint & | timing = descartes_core::TimingConstraint() |
||
| ) |
Partial constructor of cartesian trajectory point (all frames not specified by parameters are initialized to Identity). This constructor should be utilized to specify the robot tip (toleranced) point relative to the robot base.
- Parameters:
-
wobj_pt Underconstrained transform from object base to goal point on object. pos_increment Position increment used for sampling pos_increment Orientation increment used for sampling
Definition at line 178 of file src/cart_trajectory_pt.cpp.
| descartes_trajectory::CartTrajectoryPt::CartTrajectoryPt | ( | const descartes_core::Frame & | wobj_pt, |
| const descartes_core::TimingConstraint & | timing = descartes_core::TimingConstraint() |
||
| ) |
Partial constructor of cartesian trajectory point (all frames not specified by parameters are initialized to Identity). This constructor should be utilized to specify the robot tip (NOT toleranced) point relative to the robot base.
- Parameters:
-
wobj_pt Underconstrained transform from object base to goal point on object.
Definition at line 190 of file src/cart_trajectory_pt.cpp.
| virtual descartes_trajectory::CartTrajectoryPt::~CartTrajectoryPt | ( | ) | [inline, virtual] |
Definition at line 249 of file cart_trajectory_pt.h.
Member Function Documentation
| bool descartes_trajectory::CartTrajectoryPt::computeCartesianPoses | ( | EigenSTL::vector_Affine3d & | poses | ) | const [protected] |
Definition at line 214 of file src/cart_trajectory_pt.cpp.
| virtual descartes_core::TrajectoryPtPtr descartes_trajectory::CartTrajectoryPt::copy | ( | ) | const [inline, virtual] |
Implements descartes_core::TrajectoryPt.
Reimplemented in descartes_trajectory::AxialSymmetricPt.
Definition at line 294 of file cart_trajectory_pt.h.
| void descartes_trajectory::CartTrajectoryPt::getCartesianPoses | ( | const descartes_core::RobotModel & | model, |
| EigenSTL::vector_Affine3d & | poses | ||
| ) | const [virtual] |
Implements descartes_core::TrajectoryPt.
Definition at line 237 of file src/cart_trajectory_pt.cpp.
| bool descartes_trajectory::CartTrajectoryPt::getClosestCartPose | ( | const std::vector< double > & | seed_state, |
| const descartes_core::RobotModel & | model, | ||
| Eigen::Affine3d & | pose | ||
| ) | const [virtual] |
Implements descartes_core::TrajectoryPt.
Definition at line 200 of file src/cart_trajectory_pt.cpp.
| bool descartes_trajectory::CartTrajectoryPt::getClosestJointPose | ( | const std::vector< double > & | seed_state, |
| const descartes_core::RobotModel & | model, | ||
| std::vector< double > & | joint_pose | ||
| ) | const [virtual] |
Implements descartes_core::TrajectoryPt.
Definition at line 270 of file src/cart_trajectory_pt.cpp.
| void descartes_trajectory::CartTrajectoryPt::getJointPoses | ( | const descartes_core::RobotModel & | model, |
| std::vector< std::vector< double > > & | joint_poses | ||
| ) | const [virtual] |
Implements descartes_core::TrajectoryPt.
Definition at line 387 of file src/cart_trajectory_pt.cpp.
| bool descartes_trajectory::CartTrajectoryPt::getNominalCartPose | ( | const std::vector< double > & | seed_state, |
| const descartes_core::RobotModel & | model, | ||
| Eigen::Affine3d & | pose | ||
| ) | const [virtual] |
Implements descartes_core::TrajectoryPt.
Definition at line 206 of file src/cart_trajectory_pt.cpp.
| bool descartes_trajectory::CartTrajectoryPt::getNominalJointPose | ( | const std::vector< double > & | seed_state, |
| const descartes_core::RobotModel & | model, | ||
| std::vector< double > & | joint_pose | ||
| ) | const [virtual] |
Implements descartes_core::TrajectoryPt.
Definition at line 378 of file src/cart_trajectory_pt.cpp.
| bool descartes_trajectory::CartTrajectoryPt::isValid | ( | const descartes_core::RobotModel & | model | ) | const [virtual] |
Implements descartes_core::TrajectoryPt.
Definition at line 421 of file src/cart_trajectory_pt.cpp.
| bool descartes_trajectory::CartTrajectoryPt::setDiscretization | ( | const std::vector< double > & | discretization | ) | [virtual] |
Set discretization. Cartesian points can have position and angular discretization.
- Parameters:
-
discretization Vector of discretization values. Must be length 2 or 6 (position/orientation or separate xyzrpy).
- Returns:
- True if vector is valid length/values. TODO what are valid values?
Implements descartes_core::TrajectoryPt.
Definition at line 429 of file src/cart_trajectory_pt.cpp.
| void descartes_trajectory::CartTrajectoryPt::setTool | ( | const descartes_core::Frame & | base, |
| const TolerancedFrame & | pt | ||
| ) | [inline] |
Definition at line 300 of file cart_trajectory_pt.h.
| void descartes_trajectory::CartTrajectoryPt::setWobj | ( | const descartes_core::Frame & | base, |
| const TolerancedFrame & | pt | ||
| ) | [inline] |
Definition at line 307 of file cart_trajectory_pt.h.
Member Data Documentation
Definition at line 206 of file cart_trajectory_pt.h.
double descartes_trajectory::CartTrajectoryPt::orient_increment_ [protected] |
Sampling discretization in angular orientation.
Definition at line 325 of file cart_trajectory_pt.h.
double descartes_trajectory::CartTrajectoryPt::pos_increment_ [protected] |
Sampling discretization in cartesian directions.
Definition at line 324 of file cart_trajectory_pt.h.
Fixed transform from wrist/tool_plate to tool base.
Definition at line 319 of file cart_trajectory_pt.h.
Underconstrained transform from tool_base to effective pt on tool.
Definition at line 320 of file cart_trajectory_pt.h.
Fixed transform from WCS to base of object.
Definition at line 321 of file cart_trajectory_pt.h.
Underconstrained transform from object base to goal point on object.
Definition at line 322 of file cart_trajectory_pt.h.
The documentation for this class was generated from the following files: