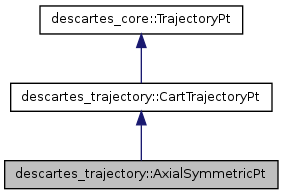
Specialization of cartesian trajectory point. Represents a cartesian point whose rotation about a chosen axis is unconstrained. More...
#include <axial_symmetric_pt.h>
Public Types | |
| enum | FreeAxis { X_AXIS, Y_AXIS, Z_AXIS } |
| Enum used to select the free axis of rotation for this point. More... | |
Public Member Functions | |
| AxialSymmetricPt (const descartes_core::TimingConstraint &timing=descartes_core::TimingConstraint()) | |
| This default constructor is exactly equivalent to CartTrajectoryPt's. Initializes all frames to identity. | |
| AxialSymmetricPt (double x, double y, double z, double rx, double ry, double rz, double orient_increment, FreeAxis axis, const descartes_core::TimingConstraint &timing=descartes_core::TimingConstraint()) | |
| Constructs a cartesian trajectory point that places the robot tip at the position defined by the transform from the origin of the world. The transform is first a translation by the vector (x,y,z) followed by an XYZ rotation (moving axis) by (rx,ry,rz) respectively. | |
| AxialSymmetricPt (const Eigen::Affine3d &pose, double orient_increment, FreeAxis axis, const descartes_core::TimingConstraint &timing=descartes_core::TimingConstraint()) | |
| Similar to other constructor except that it takes an affine pose instead of individual translation and rotation arguments. | |
| virtual descartes_core::TrajectoryPtPtr | copy () const |
Detailed Description
Specialization of cartesian trajectory point. Represents a cartesian point whose rotation about a chosen axis is unconstrained.
Definition at line 32 of file axial_symmetric_pt.h.
Member Enumeration Documentation
Enum used to select the free axis of rotation for this point.
Definition at line 39 of file axial_symmetric_pt.h.
Constructor & Destructor Documentation
| descartes_trajectory::AxialSymmetricPt::AxialSymmetricPt | ( | const descartes_core::TimingConstraint & | timing = descartes_core::TimingConstraint() | ) |
This default constructor is exactly equivalent to CartTrajectoryPt's. Initializes all frames to identity.
Definition at line 53 of file src/axial_symmetric_pt.cpp.
| descartes_trajectory::AxialSymmetricPt::AxialSymmetricPt | ( | double | x, |
| double | y, | ||
| double | z, | ||
| double | rx, | ||
| double | ry, | ||
| double | rz, | ||
| double | orient_increment, | ||
| FreeAxis | axis, | ||
| const descartes_core::TimingConstraint & | timing = descartes_core::TimingConstraint() |
||
| ) |
Constructs a cartesian trajectory point that places the robot tip at the position defined by the transform from the origin of the world. The transform is first a translation by the vector (x,y,z) followed by an XYZ rotation (moving axis) by (rx,ry,rz) respectively.
- Parameters:
-
x x component of translation part of transform y y component of translation part of transform z z component of translation part of transform rx rotation about x axis of nominal pose ry rotation about y axis of nominal pose rz rotation about z axis of nominal pose orient_increment (in radians, discretization of space [-Pi, Pi]) axis The free-axis of the nominal pose of the tool
Definition at line 57 of file src/axial_symmetric_pt.cpp.
| descartes_trajectory::AxialSymmetricPt::AxialSymmetricPt | ( | const Eigen::Affine3d & | pose, |
| double | orient_increment, | ||
| FreeAxis | axis, | ||
| const descartes_core::TimingConstraint & | timing = descartes_core::TimingConstraint() |
||
| ) |
Similar to other constructor except that it takes an affine pose instead of individual translation and rotation arguments.
Definition at line 67 of file src/axial_symmetric_pt.cpp.
Member Function Documentation
| virtual descartes_core::TrajectoryPtPtr descartes_trajectory::AxialSymmetricPt::copy | ( | ) | const [inline, virtual] |
Reimplemented from descartes_trajectory::CartTrajectoryPt.
Definition at line 78 of file axial_symmetric_pt.h.
The documentation for this class was generated from the following files: