#include <registration_icp_edges.h>
Public Member Functions | |
| virtual boost::shared_ptr < const pcl::PointCloud< Point > > | getMarkers () |
| debug function for marker visualization | |
| Registration_ICP_Edges () | |
| void | setDisThreshold (float v) |
| void | setRadius (float v) |
| void | setThreshold (float v) |
| virtual | ~Registration_ICP_Edges () |
Protected Member Functions | |
| virtual bool | compute_features () |
| virtual bool | compute_transformation () |
Private Attributes | |
| bool | first_ |
| Feature_Edges< Point > * | mom_ |
| pcl::PointCloud< Point > | tmp_input_ |
Detailed Description
template<typename Point>
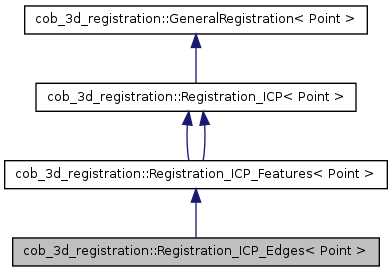
class cob_3d_registration::Registration_ICP_Edges< Point >
Definition at line 79 of file registration_icp_edges.h.
Constructor & Destructor Documentation
| cob_3d_registration::Registration_ICP_Edges< Point >::Registration_ICP_Edges | ( | ) | [inline] |
Definition at line 86 of file registration_icp_edges.h.
| virtual cob_3d_registration::Registration_ICP_Edges< Point >::~Registration_ICP_Edges | ( | ) | [inline, virtual] |
Definition at line 93 of file registration_icp_edges.h.
Member Function Documentation
| virtual bool cob_3d_registration::Registration_ICP_Edges< Point >::compute_features | ( | ) | [inline, protected, virtual] |
Reimplemented from cob_3d_registration::Registration_ICP< Point >.
Definition at line 110 of file registration_icp_edges.h.
| virtual bool cob_3d_registration::Registration_ICP_Edges< Point >::compute_transformation | ( | ) | [inline, protected, virtual] |
Reimplemented from cob_3d_registration::Registration_ICP< Point >.
Definition at line 120 of file registration_icp_edges.h.
| virtual boost::shared_ptr<const pcl::PointCloud<Point> > cob_3d_registration::Registration_ICP_Edges< Point >::getMarkers | ( | ) | [inline, virtual] |
debug function for marker visualization
Reimplemented from cob_3d_registration::GeneralRegistration< Point >.
Definition at line 97 of file registration_icp_edges.h.
| void cob_3d_registration::Registration_ICP_Edges< Point >::setDisThreshold | ( | float | v | ) | [inline] |
Definition at line 107 of file registration_icp_edges.h.
| void cob_3d_registration::Registration_ICP_Edges< Point >::setRadius | ( | float | v | ) | [inline] |
Definition at line 105 of file registration_icp_edges.h.
| void cob_3d_registration::Registration_ICP_Edges< Point >::setThreshold | ( | float | v | ) | [inline] |
Definition at line 106 of file registration_icp_edges.h.
Member Data Documentation
bool cob_3d_registration::Registration_ICP_Edges< Point >::first_ [private] |
Definition at line 83 of file registration_icp_edges.h.
Feature_Edges<Point>* cob_3d_registration::Registration_ICP_Edges< Point >::mom_ [private] |
Definition at line 81 of file registration_icp_edges.h.
pcl::PointCloud<Point> cob_3d_registration::Registration_ICP_Edges< Point >::tmp_input_ [private] |
Definition at line 82 of file registration_icp_edges.h.
The documentation for this class was generated from the following file: