#include <Eigen/Dense>#include <ostream>#include <vector>#include <set>#include <map>#include <queue>
Include dependency graph for filter_base.h:

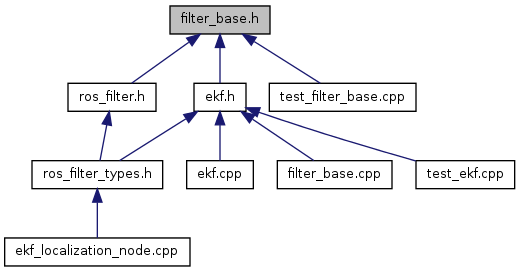
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | RobotLocalization::FilterBase |
| struct | RobotLocalization::Measurement |
| Structure used for storing and comparing measurements (for priority queues) More... | |
Namespaces | |
| namespace | RobotLocalization |
Functions | |
| std::ostream & | operator<< (std::ostream &os, const Eigen::MatrixXd &mat) |
| std::ostream & | operator<< (std::ostream &os, const Eigen::VectorXd &vec) |
| std::ostream & | operator<< (std::ostream &os, const std::vector< size_t > &vec) |
| std::ostream & | operator<< (std::ostream &os, const std::vector< int > &vec) |
Function Documentation
| std::ostream& operator<< | ( | std::ostream & | os, |
| const Eigen::MatrixXd & | mat | ||
| ) |
Definition at line 415 of file filter_base.cpp.
| std::ostream& operator<< | ( | std::ostream & | os, |
| const Eigen::VectorXd & | vec | ||
| ) |
Definition at line 444 of file filter_base.cpp.
| std::ostream& operator<< | ( | std::ostream & | os, |
| const std::vector< size_t > & | vec | ||
| ) |
Definition at line 456 of file filter_base.cpp.
| std::ostream& operator<< | ( | std::ostream & | os, |
| const std::vector< int > & | vec | ||
| ) |
Definition at line 468 of file filter_base.cpp.