#include "kinematic_model.h"
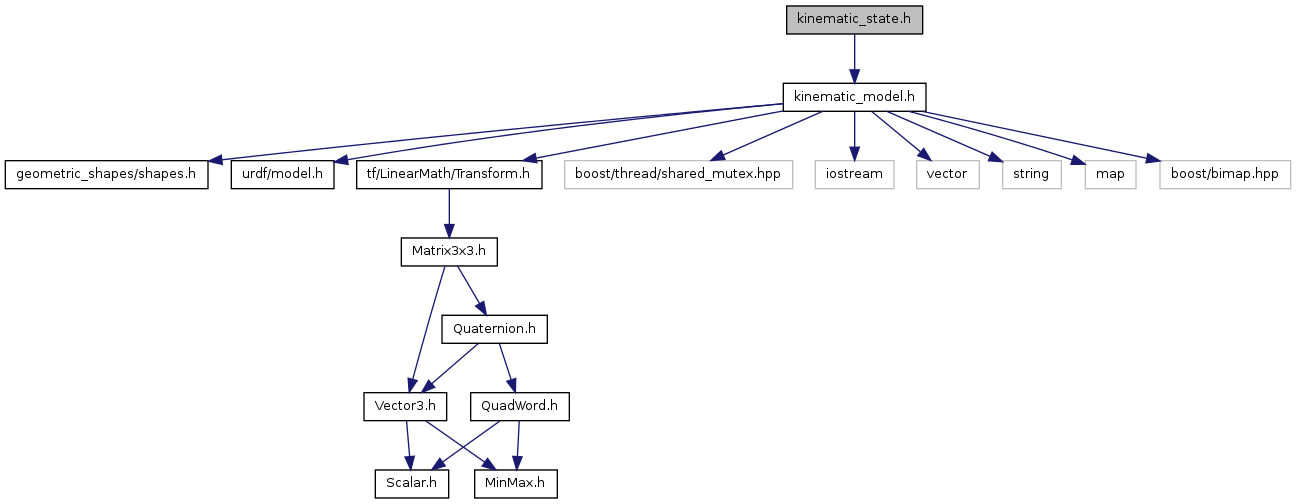
Include dependency graph for kinematic_state.h:
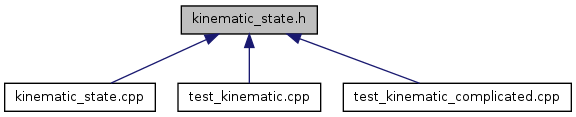
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | planning_models::KinematicState::AttachedBodyState |
| class | planning_models::KinematicState::JointState |
| Forward definition of a joint group state. More... | |
| class | planning_models::KinematicState::JointStateGroup |
| class | planning_models::KinematicState |
| Definition of a kinematic state - the parts of the robot state which can change. It is not thread safe, however multiple instances can be created. More... | |
| class | planning_models::KinematicState::LinkState |
Namespaces | |
| namespace | planning_models |
Main namespace. | |