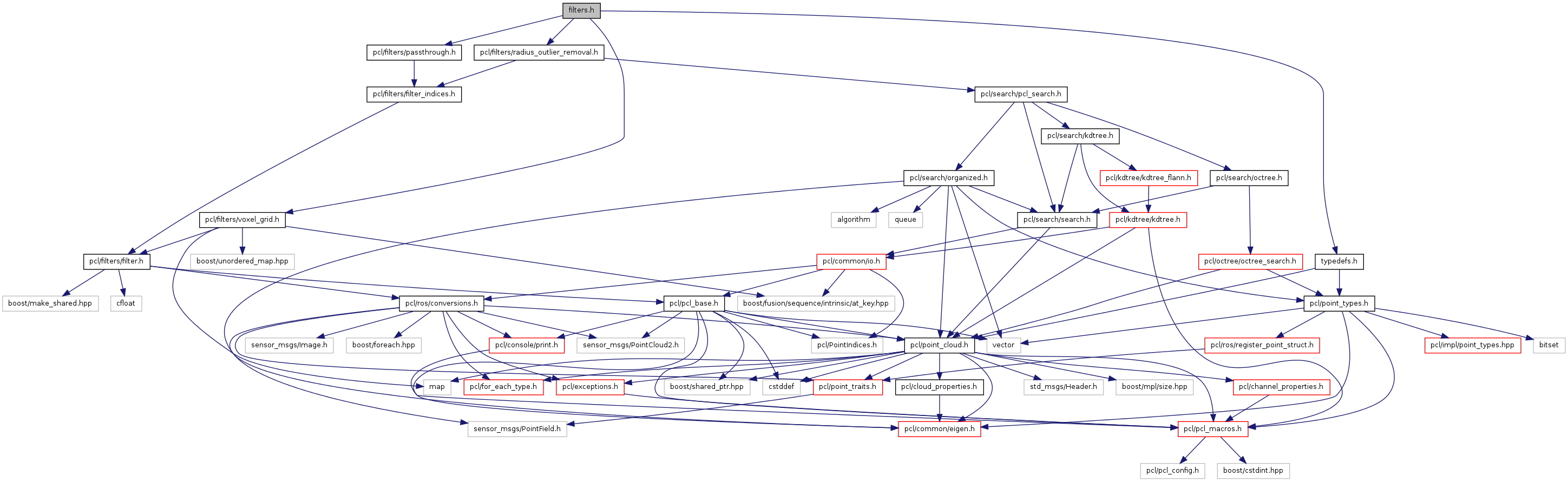
#include <pcl/filters/passthrough.h>#include <pcl/filters/voxel_grid.h>#include <pcl/filters/radius_outlier_removal.h>#include "typedefs.h"
Include dependency graph for iros2011/include/filters.h:
Go to the source code of this file.
Functions | |
| PointCloudPtr | downsample (const PointCloudPtr &input, float leaf_size) |
| PointCloudPtr | removeOutliers (const PointCloudPtr &input, float radius, int min_neighbors) |
| PointCloudPtr | thresholdDepth (const PointCloudPtr &input, float min_depth, float max_depth) |
Function Documentation
| PointCloudPtr downsample | ( | const PointCloudPtr & | input, |
| float | leaf_size | ||
| ) |
Definition at line 20 of file iros2011/include/filters.h.
| PointCloudPtr removeOutliers | ( | const PointCloudPtr & | input, |
| float | radius, | ||
| int | min_neighbors | ||
| ) |
Definition at line 28 of file iros2011/include/filters.h.
| PointCloudPtr thresholdDepth | ( | const PointCloudPtr & | input, |
| float | min_depth, | ||
| float | max_depth | ||
| ) |
Definition at line 12 of file iros2011/include/filters.h.