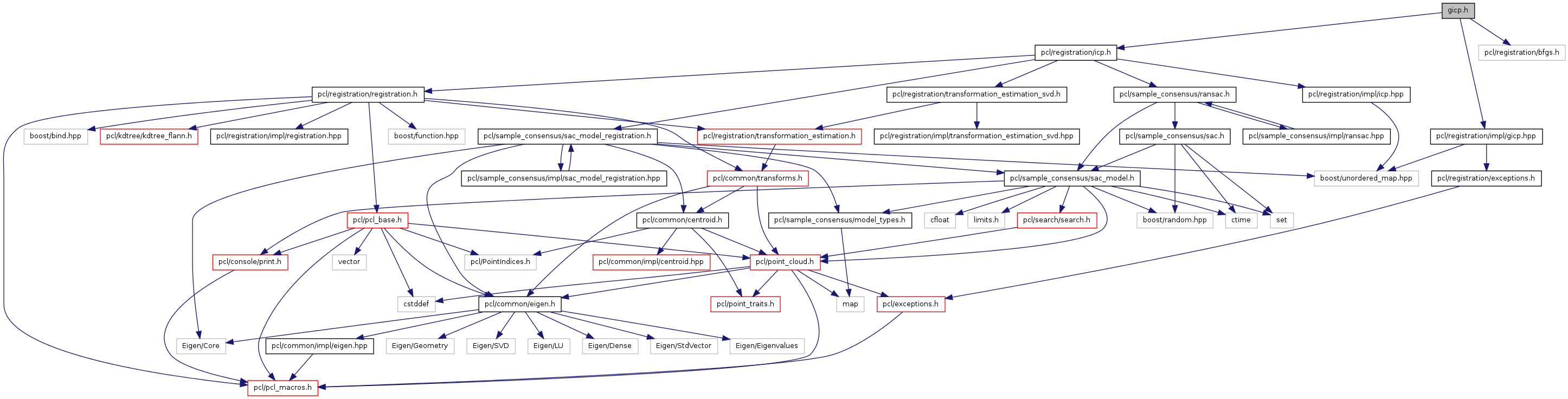
#include <pcl/registration/icp.h>#include <pcl/registration/bfgs.h>#include <pcl/registration/impl/gicp.hpp>
Include dependency graph for gicp.h:
Go to the source code of this file.
Classes | |
| class | pcl::GeneralizedIterativeClosestPoint< PointSource, PointTarget > |
| GeneralizedIterativeClosestPoint is an ICP variant that implements the generalized iterative closest point algorithm as described by Alex Segal et al. in http://www.stanford.edu/~avsegal/resources/papers/Generalized_ICP.pdf The approach is based on using anistropic cost functions to optimize the alignment after closest point assignments have been made. The original code uses GSL and ANN while in ours we use an eigen mapped BFGS and FLANN. More... | |
| struct | pcl::GeneralizedIterativeClosestPoint< PointSource, PointTarget >::OptimizationFunctorWithIndices |
| optimization functor structure More... | |
Namespaces | |
| namespace | pcl |