NormalEstimation estimates local surface properties (surface normals and curvatures)at each 3D point. If PointOutT is specified as pcl::Normal, the normal is stored in the first 3 components (0-2), and the curvature is stored in component 3. More...
#include <normal_3d.h>
Public Types | |
| typedef Feature< PointInT, PointOutT > ::PointCloudConstPtr | PointCloudConstPtr |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
Public Member Functions | |
| void | computePointNormal (const pcl::PointCloud< PointInT > &cloud, const std::vector< int > &indices, Eigen::Vector4f &plane_parameters, float &curvature) |
| Compute the Least-Squares plane fit for a given set of points, using their indices, and return the estimated plane parameters together with the surface curvature. | |
| void | computePointNormal (const pcl::PointCloud< PointInT > &cloud, const std::vector< int > &indices, float &nx, float &ny, float &nz, float &curvature) |
| Compute the Least-Squares plane fit for a given set of points, using their indices, and return the estimated plane parameters together with the surface curvature. | |
| void | getViewPoint (float &vpx, float &vpy, float &vpz) |
| Get the viewpoint. | |
| NormalEstimation () | |
| Empty constructor. | |
| virtual void | setInputCloud (const PointCloudConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| void | setViewPoint (float vpx, float vpy, float vpz) |
| Set the viewpoint. | |
| void | useSensorOriginAsViewPoint () |
| sets whether the sensor origin or a user given viewpoint should be used. After this method, the normal estimation method uses the sensor origin of the input cloud. to use a user defined view point, use the method setViewPoint | |
Protected Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Estimate normals for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
Protected Attributes | |
| EIGEN_ALIGN16 Eigen::Matrix3f | covariance_matrix_ |
| Placeholder for the 3x3 covariance matrix at each surface patch. | |
| bool | use_sensor_origin_ |
| float | vpx_ |
| Values describing the viewpoint ("pinhole" camera model assumed). For per point viewpoints, inherit from NormalEstimation and provide your own computeFeature (). By default, the viewpoint is set to 0,0,0. | |
| float | vpy_ |
| float | vpz_ |
| Eigen::Vector4f | xyz_centroid_ |
| 16-bytes aligned placeholder for the XYZ centroid of a surface patch. | |
Private Member Functions | |
| void | computeFeatureEigen (pcl::PointCloud< Eigen::MatrixXf > &) |
| Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class. | |
Detailed Description
template<typename PointInT, typename PointOutT>
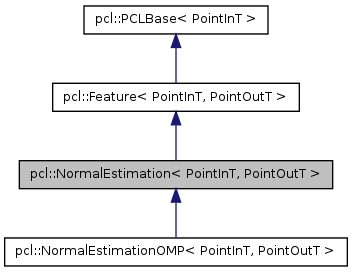
class pcl::NormalEstimation< PointInT, PointOutT >
NormalEstimation estimates local surface properties (surface normals and curvatures)at each 3D point. If PointOutT is specified as pcl::Normal, the normal is stored in the first 3 components (0-2), and the curvature is stored in component 3.
- Note:
- The code is stateful as we do not expect this class to be multicore parallelized. Please look at NormalEstimationOMP for a parallel implementation.
Definition at line 193 of file normal_3d.h.
Member Typedef Documentation
| typedef Feature<PointInT, PointOutT>::PointCloudConstPtr pcl::NormalEstimation< PointInT, PointOutT >::PointCloudConstPtr |
Reimplemented from pcl::PCLBase< PointInT >.
Definition at line 206 of file normal_3d.h.
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::NormalEstimation< PointInT, PointOutT >::PointCloudOut |
Reimplemented from pcl::Feature< PointInT, PointOutT >.
Reimplemented in pcl::NormalEstimationOMP< PointInT, PointOutT >, pcl::NormalEstimationOMP< PointInT, pcl::Normal >, and pcl::NormalEstimationOMP< PointType, pcl::Normal >.
Definition at line 205 of file normal_3d.h.
Constructor & Destructor Documentation
| pcl::NormalEstimation< PointInT, PointOutT >::NormalEstimation | ( | ) | [inline] |
Empty constructor.
Definition at line 209 of file normal_3d.h.
Member Function Documentation
| void pcl::NormalEstimation< PointInT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [protected, virtual] |
Estimate normals for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
- Note:
- In situations where not enough neighbors are found, the normal and curvature values are set to -1.
- Parameters:
-
output the resultant point cloud model dataset that contains surface normals and curvatures
Implements pcl::Feature< PointInT, PointOutT >.
Reimplemented in pcl::NormalEstimationOMP< PointInT, PointOutT >, pcl::NormalEstimationOMP< PointInT, pcl::Normal >, and pcl::NormalEstimationOMP< PointType, pcl::Normal >.
Definition at line 47 of file normal_3d.hpp.
| void pcl::NormalEstimation< PointInT, PointOutT >::computeFeatureEigen | ( | pcl::PointCloud< Eigen::MatrixXf > & | ) | [inline, private, virtual] |
Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class.
- Parameters:
-
[out] output the output point cloud
Implements pcl::Feature< PointInT, PointOutT >.
Reimplemented in pcl::NormalEstimation< PointInT, Eigen::MatrixXf >, pcl::NormalEstimationOMP< PointInT, Eigen::MatrixXf >, pcl::NormalEstimationOMP< PointInT, PointOutT >, pcl::NormalEstimationOMP< PointInT, pcl::Normal >, and pcl::NormalEstimationOMP< PointType, pcl::Normal >.
Definition at line 363 of file normal_3d.h.
| void pcl::NormalEstimation< PointInT, PointOutT >::computePointNormal | ( | const pcl::PointCloud< PointInT > & | cloud, |
| const std::vector< int > & | indices, | ||
| Eigen::Vector4f & | plane_parameters, | ||
| float & | curvature | ||
| ) | [inline] |
Compute the Least-Squares plane fit for a given set of points, using their indices, and return the estimated plane parameters together with the surface curvature.
- Parameters:
-
cloud the input point cloud indices the point cloud indices that need to be used plane_parameters the plane parameters as: a, b, c, d (ax + by + cz + d = 0) curvature the estimated surface curvature as a measure of ![\[ \lambda_0 / (\lambda_0 + \lambda_1 + \lambda_2) \]](form_1.png)
Definition at line 231 of file normal_3d.h.
| void pcl::NormalEstimation< PointInT, PointOutT >::computePointNormal | ( | const pcl::PointCloud< PointInT > & | cloud, |
| const std::vector< int > & | indices, | ||
| float & | nx, | ||
| float & | ny, | ||
| float & | nz, | ||
| float & | curvature | ||
| ) | [inline] |
Compute the Least-Squares plane fit for a given set of points, using their indices, and return the estimated plane parameters together with the surface curvature.
- Parameters:
-
cloud the input point cloud indices the point cloud indices that need to be used nx the resultant X component of the plane normal ny the resultant Y component of the plane normal nz the resultant Z component of the plane normal curvature the estimated surface curvature as a measure of
Definition at line 257 of file normal_3d.h.
| void pcl::NormalEstimation< PointInT, PointOutT >::getViewPoint | ( | float & | vpx, |
| float & | vpy, | ||
| float & | vpz | ||
| ) | [inline] |
Get the viewpoint.
- Parameters:
-
[out] vpx x-coordinate of the view point [out] vpy y-coordinate of the view point [out] vpz z-coordinate of the view point
- Note:
- this method returns the currently used viewpoint for normal flipping. If the viewpoint is set manually using the setViewPoint method, this method will return the set view point coordinates. If an input cloud is set, it will return the sensor origin otherwise it will return the origin (0, 0, 0)
Definition at line 307 of file normal_3d.h.
| virtual void pcl::NormalEstimation< PointInT, PointOutT >::setInputCloud | ( | const PointCloudConstPtr & | cloud | ) | [inline, virtual] |
Provide a pointer to the input dataset.
- Parameters:
-
cloud the const boost shared pointer to a PointCloud message
Definition at line 273 of file normal_3d.h.
| void pcl::NormalEstimation< PointInT, PointOutT >::setViewPoint | ( | float | vpx, |
| float | vpy, | ||
| float | vpz | ||
| ) | [inline] |
Set the viewpoint.
- Parameters:
-
vpx the X coordinate of the viewpoint vpy the Y coordinate of the viewpoint vpz the Z coordinate of the viewpoint
Definition at line 290 of file normal_3d.h.
| void pcl::NormalEstimation< PointInT, PointOutT >::useSensorOriginAsViewPoint | ( | ) | [inline] |
sets whether the sensor origin or a user given viewpoint should be used. After this method, the normal estimation method uses the sensor origin of the input cloud. to use a user defined view point, use the method setViewPoint
Definition at line 319 of file normal_3d.h.
Member Data Documentation
EIGEN_ALIGN16 Eigen::Matrix3f pcl::NormalEstimation< PointInT, PointOutT >::covariance_matrix_ [protected] |
Placeholder for the 3x3 covariance matrix at each surface patch.
Definition at line 350 of file normal_3d.h.
bool pcl::NormalEstimation< PointInT, PointOutT >::use_sensor_origin_ [protected] |
whether the sensor origin of the input cloud or a user given viewpoint should be used.
Definition at line 356 of file normal_3d.h.
float pcl::NormalEstimation< PointInT, PointOutT >::vpx_ [protected] |
Values describing the viewpoint ("pinhole" camera model assumed). For per point viewpoints, inherit from NormalEstimation and provide your own computeFeature (). By default, the viewpoint is set to 0,0,0.
Definition at line 347 of file normal_3d.h.
float pcl::NormalEstimation< PointInT, PointOutT >::vpy_ [protected] |
Definition at line 347 of file normal_3d.h.
float pcl::NormalEstimation< PointInT, PointOutT >::vpz_ [protected] |
Definition at line 347 of file normal_3d.h.
Eigen::Vector4f pcl::NormalEstimation< PointInT, PointOutT >::xyz_centroid_ [protected] |
16-bytes aligned placeholder for the XYZ centroid of a surface patch.
Definition at line 353 of file normal_3d.h.
The documentation for this class was generated from the following files: