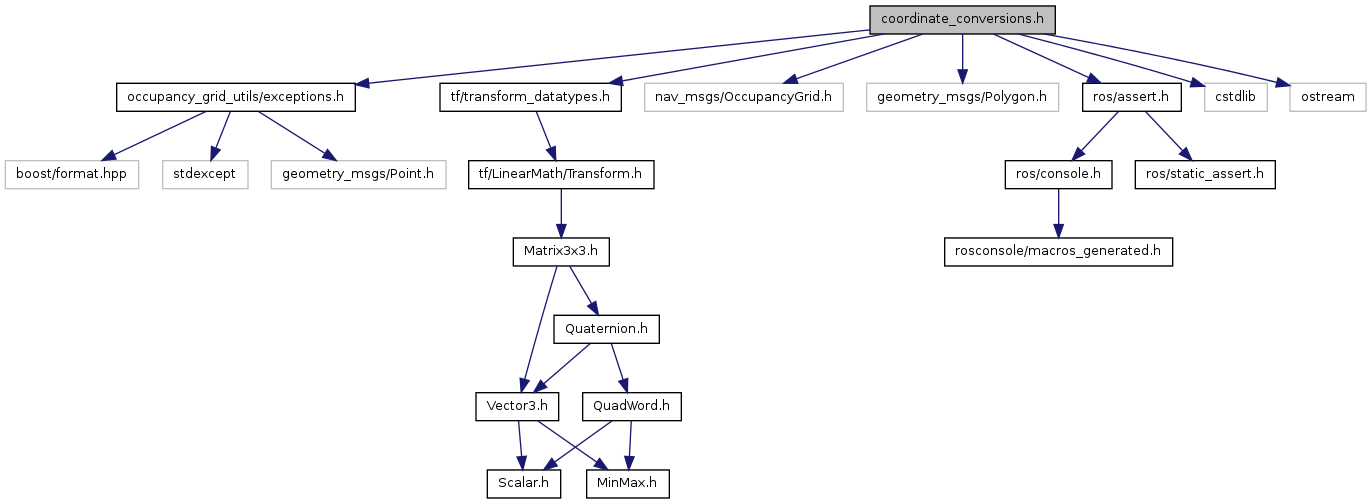
#include <occupancy_grid_utils/exceptions.h>#include <tf/transform_datatypes.h>#include <nav_msgs/OccupancyGrid.h>#include <geometry_msgs/Polygon.h>#include <ros/assert.h>#include <cstdlib>#include <ostream>
Include dependency graph for coordinate_conversions.h:
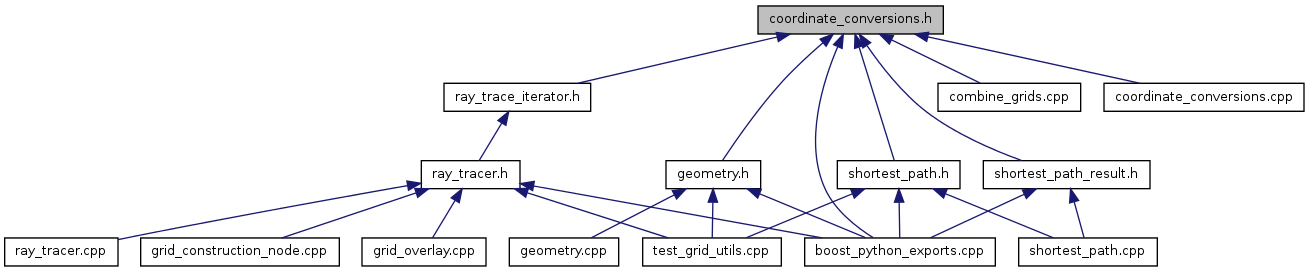
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | occupancy_grid_utils::Cell |
Namespaces | |
| namespace | occupancy_grid_utils |
Typedefs | |
| typedef int16_t | occupancy_grid_utils::coord_t |
| typedef uint32_t | occupancy_grid_utils::index_t |
Functions | |
| geometry_msgs::Point | occupancy_grid_utils::cellCenter (const nav_msgs::MapMetaData &info, const Cell &c) |
| Return center of a cell. | |
| index_t | occupancy_grid_utils::cellIndex (const nav_msgs::MapMetaData &info, const Cell &c) |
| Returns the index of a cell. | |
| geometry_msgs::Polygon | occupancy_grid_utils::cellPolygon (const nav_msgs::MapMetaData &info, const Cell &c) |
| Return polygon corresponding to a cell. | |
| geometry_msgs::Polygon | occupancy_grid_utils::gridPolygon (const nav_msgs::MapMetaData &info) |
| Return polygon corresponding to grid bounds. | |
| Cell | occupancy_grid_utils::indexCell (const nav_msgs::MapMetaData &info, index_t ind) |
| Returns cell corresponding to index. | |
| tf::Transform | occupancy_grid_utils::mapToWorld (const nav_msgs::MapMetaData &info) |
| std::ostream & | occupancy_grid_utils::operator<< (std::ostream &str, const Cell &c) |
| Cell | occupancy_grid_utils::pointCell (const nav_msgs::MapMetaData &info, const geometry_msgs::Point &p) |
| Returns cell corresponding to a point. | |
| index_t | occupancy_grid_utils::pointIndex (const nav_msgs::MapMetaData &info, const geometry_msgs::Point &p) |
| Returns index of a point. | |
| void | occupancy_grid_utils::verifyDataSize (const nav_msgs::OccupancyGrid &g) |
| Verify that data vector has the right size, throw DataSizeException otherwise. | |
| bool | occupancy_grid_utils::withinBounds (const nav_msgs::MapMetaData &info, const geometry_msgs::Point &p) |
| Check if a point is on the grid. | |
| bool | occupancy_grid_utils::withinBounds (const nav_msgs::MapMetaData &info, const Cell &c) |
| Check if a cell is on the grid. | |
| tf::Transform | occupancy_grid_utils::worldToMap (const nav_msgs::MapMetaData &info) |
Variables | |
| const int8_t | occupancy_grid_utils::OCCUPIED = 100 |
| const int8_t | occupancy_grid_utils::UNKNOWN = 255 |
| const int8_t | occupancy_grid_utils::UNOCCUPIED = 0 |
Detailed Description
General utilities for coordinate conversions
Definition in file coordinate_conversions.h.