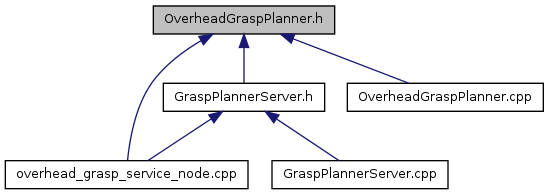
#include <ros/ros.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <object_manipulation_tools/grasp_planners/GraspPlannerInterface.h>#include <XmlRpc.h>#include <tf/transform_datatypes.h>#include <tf/transform_broadcaster.h>#include <tf/transform_listener.h>
Go to the source code of this file.
Classes | |
| class | OverheadGraspPlanner |
| struct | OverheadGraspPlanner::ParameterVals |
Variables | |
| const std::string | GRASP_PLANNER_NAME = "OverheadGraspPlanner" |
| const tf::Vector3 | PARAM_DEFAULT_APPROACH_VECTOR = tf::Vector3(0.0f,0.0f,-1.0f) |
| const bool | PARAM_DEFAULT_GRASP_IN_WORLD_COORDINATES = true |
| const int | PARAM_DEFAULT_NUM_CANDIDATE_GRASPS = 8 |
| const double | PARAM_DEFAULT_PLANE_PROXIMITY_THRESHOLD = 0.005 |
| const double | PARAM_DEFAULT_PREGRASP_DISTANCE = 0.1f |
| const double | PARAM_DEFAULT_SEARCH_RADIUS = 0.005 |
| const std::string | PARAM_NAME_APPROACH_VECTOR = "/approach_vector" |
| const std::string | PARAM_NAME_DEFAULT_PREGRASP_DISTANCE = "/default_pregrasp_distance" |
| const std::string | PARAM_NAME_GRASP_IN_WORLD_COORDINATES = "grasp_pose_in_world_coordinates" |
| const std::string | PARAM_NAME_NUM_CANDIDATE_GRASPS = "/num_returned_candidate_grasps" |
| const std::string | PARAM_NAME_PLANE_PROXIMITY_THRESHOLD = "/plane_proximity_threshold" |
| const std::string | PARAM_NAME_SEARCH_RADIUS = "/search_radius" |
| const int | SEARCH_MAX_CLUSTER_SIZE = 5000 |
| const int | SEARCH_MIN_CLUSTER_SIZE = 50.0f |
Variable Documentation
| const std::string GRASP_PLANNER_NAME = "OverheadGraspPlanner" |
Definition at line 39 of file OverheadGraspPlanner.h.
| const tf::Vector3 PARAM_DEFAULT_APPROACH_VECTOR = tf::Vector3(0.0f,0.0f,-1.0f) |
Definition at line 36 of file OverheadGraspPlanner.h.
| const bool PARAM_DEFAULT_GRASP_IN_WORLD_COORDINATES = true |
Definition at line 35 of file OverheadGraspPlanner.h.
| const int PARAM_DEFAULT_NUM_CANDIDATE_GRASPS = 8 |
Definition at line 34 of file OverheadGraspPlanner.h.
| const double PARAM_DEFAULT_PLANE_PROXIMITY_THRESHOLD = 0.005 |
Definition at line 32 of file OverheadGraspPlanner.h.
| const double PARAM_DEFAULT_PREGRASP_DISTANCE = 0.1f |
Definition at line 31 of file OverheadGraspPlanner.h.
| const double PARAM_DEFAULT_SEARCH_RADIUS = 0.005 |
Definition at line 33 of file OverheadGraspPlanner.h.
| const std::string PARAM_NAME_APPROACH_VECTOR = "/approach_vector" |
Definition at line 27 of file OverheadGraspPlanner.h.
| const std::string PARAM_NAME_DEFAULT_PREGRASP_DISTANCE = "/default_pregrasp_distance" |
Definition at line 22 of file OverheadGraspPlanner.h.
| const std::string PARAM_NAME_GRASP_IN_WORLD_COORDINATES = "grasp_pose_in_world_coordinates" |
Definition at line 25 of file OverheadGraspPlanner.h.
| const std::string PARAM_NAME_NUM_CANDIDATE_GRASPS = "/num_returned_candidate_grasps" |
Definition at line 24 of file OverheadGraspPlanner.h.
| const std::string PARAM_NAME_PLANE_PROXIMITY_THRESHOLD = "/plane_proximity_threshold" |
Definition at line 23 of file OverheadGraspPlanner.h.
| const std::string PARAM_NAME_SEARCH_RADIUS = "/search_radius" |
Definition at line 26 of file OverheadGraspPlanner.h.
| const int SEARCH_MAX_CLUSTER_SIZE = 5000 |
Definition at line 41 of file OverheadGraspPlanner.h.
| const int SEARCH_MIN_CLUSTER_SIZE = 50.0f |
Definition at line 40 of file OverheadGraspPlanner.h.