Sick LMS-xxx noise model. More...
#include <DataPointsFiltersImpl.h>
Public Member Functions | |
| virtual DataPoints | filter (const DataPoints &input) |
| Apply filters to input point cloud. This is the non-destructive version and returns a copy. | |
| virtual void | inPlaceFilter (DataPoints &cloud) |
| Apply these filters to a point cloud without copying. | |
| SimpleSensorNoiseDataPointsFilter (const Parameters ¶ms=Parameters()) | |
| Constructor, uses parameter interface. | |
Static Public Member Functions | |
| static const ParametersDoc | availableParameters () |
| static const std::string | description () |
Public Attributes | |
| const T | gain |
| const unsigned | sensorType |
Private Member Functions | |
| Matrix | computeLaserNoise (const T minRadius, const T beamAngle, const T beamConst, const Matrix features) |
Detailed Description
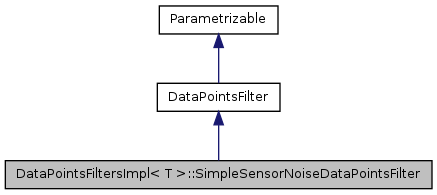
template<typename T>
struct DataPointsFiltersImpl< T >::SimpleSensorNoiseDataPointsFilter
Sick LMS-xxx noise model.
Definition at line 472 of file DataPointsFiltersImpl.h.
Constructor & Destructor Documentation
| DataPointsFiltersImpl< T >::SimpleSensorNoiseDataPointsFilter::SimpleSensorNoiseDataPointsFilter | ( | const Parameters & | params = Parameters() | ) |
Constructor, uses parameter interface.
Definition at line 1211 of file DataPointsFiltersImpl.cpp.
Member Function Documentation
| static const ParametersDoc DataPointsFiltersImpl< T >::SimpleSensorNoiseDataPointsFilter::availableParameters | ( | ) | [inline, static] |
Definition at line 479 of file DataPointsFiltersImpl.h.
| PointMatcher< T >::Matrix DataPointsFiltersImpl< T >::SimpleSensorNoiseDataPointsFilter::computeLaserNoise | ( | const T | minRadius, |
| const T | beamAngle, | ||
| const T | beamConst, | ||
| const Matrix | features | ||
| ) | [private] |
- Parameters:
-
minRadius in meter, noise level of depth measurements beamAngle in rad, half of the total laser beam beamConst in meter, minimum size of the laser beam features points from the sensor
Definition at line 1278 of file DataPointsFiltersImpl.cpp.
| static const std::string DataPointsFiltersImpl< T >::SimpleSensorNoiseDataPointsFilter::description | ( | ) | [inline, static] |
Definition at line 474 of file DataPointsFiltersImpl.h.
| PointMatcher< T >::DataPoints DataPointsFiltersImpl< T >::SimpleSensorNoiseDataPointsFilter::filter | ( | const DataPoints & | input | ) | [virtual] |
Apply filters to input point cloud. This is the non-destructive version and returns a copy.
Implements PointMatcher< T >::DataPointsFilter.
Definition at line 1230 of file DataPointsFiltersImpl.cpp.
| void DataPointsFiltersImpl< T >::SimpleSensorNoiseDataPointsFilter::inPlaceFilter | ( | DataPoints & | cloud | ) | [virtual] |
Apply these filters to a point cloud without copying.
Implements PointMatcher< T >::DataPointsFilter.
Definition at line 1240 of file DataPointsFiltersImpl.cpp.
Member Data Documentation
| const T DataPointsFiltersImpl< T >::SimpleSensorNoiseDataPointsFilter::gain |
Definition at line 488 of file DataPointsFiltersImpl.h.
| const unsigned DataPointsFiltersImpl< T >::SimpleSensorNoiseDataPointsFilter::sensorType |
Definition at line 487 of file DataPointsFiltersImpl.h.
The documentation for this struct was generated from the following files: