#include <string>#include <vector>#include <tinyxml.h>#include <boost/shared_ptr.hpp>#include "pose.h"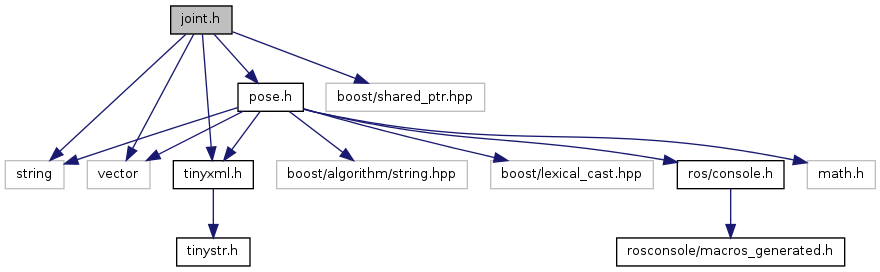
Go to the source code of this file.
Classes | |
| class | urdf::Joint |
| class | urdf::JointCalibration |
| class | urdf::JointDynamics |
| class | urdf::JointLimits |
| class | urdf::JointMimic |
| class | urdf::JointSafety |
| Parameters for Joint Safety Controllers. More... | |
Namespaces | |
| namespace | urdf |

