#include <telekyb_defines/telekyb_defines.hpp>#include <telekyb_base/Options.hpp>#include <tk_state/StateEstimator.hpp>#include <EigenTools.hpp>#include <pluginlib/class_list_macros.h>#include <sensor_msgs/Imu.h>#include <telekyb_msgs/TKState.h>#include <geometry_msgs/TransformStamped.h>#include <telekyb_base/Time.hpp>#include <stdint.h>#include <deque>#include <StateEstimators/MeasureHandler.hpp>#include <boost/thread/mutex.hpp>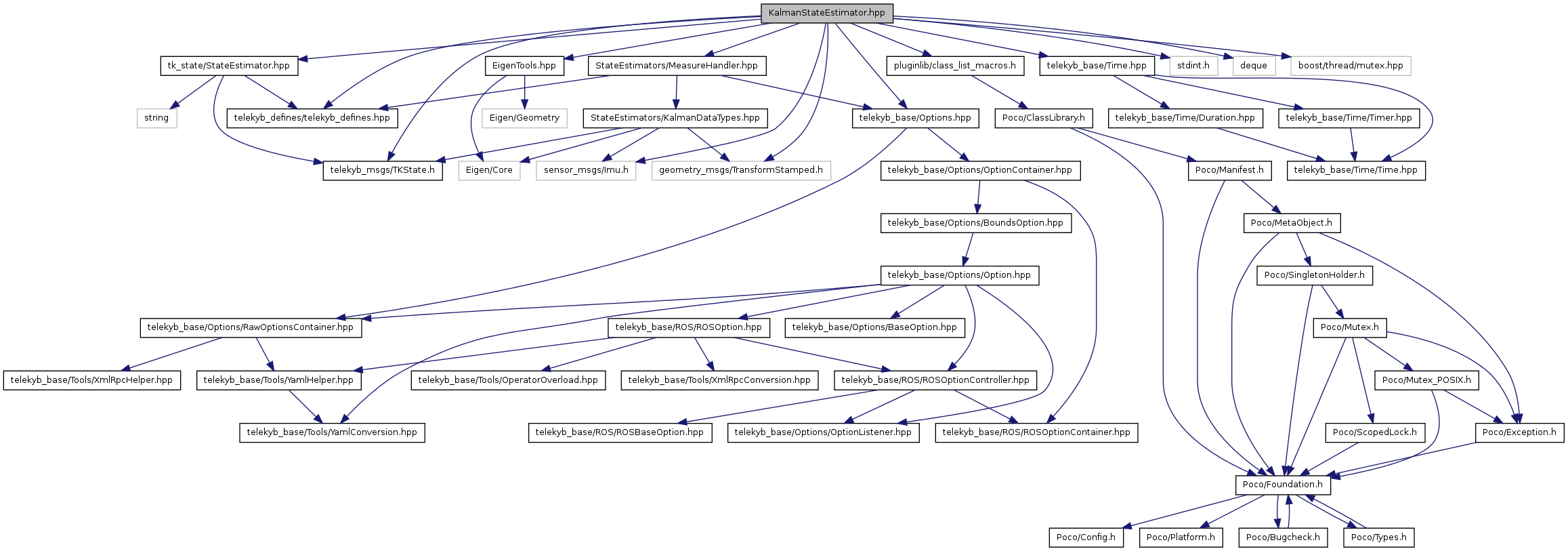
Go to the source code of this file.
Classes | |
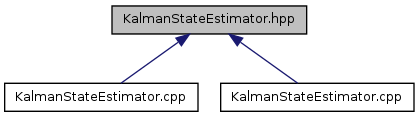
| class | telekyb_state::KalmanStateEstimator |
| class | telekyb_state::KalmanStateEstimatorOptions |
Namespaces | |
| namespace | telekyb_state |

