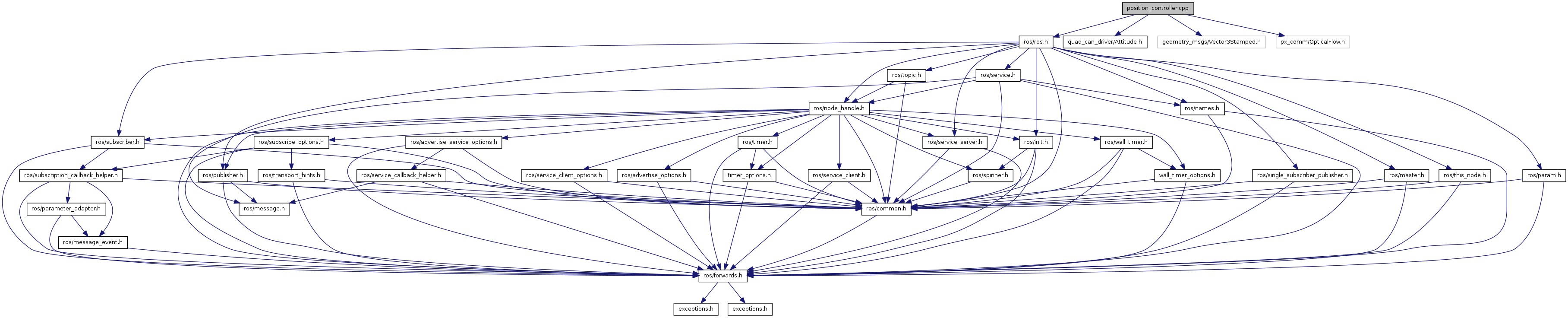
#include "ros/ros.h"#include "quad_can_driver/Attitude.h"#include <geometry_msgs/Vector3Stamped.h>#include "px_comm/OpticalFlow.h"
Include dependency graph for position_controller.cpp:
Go to the source code of this file.
Classes | |
| struct | OF_str |
Defines | |
| #define | PI 3.14159256 |
Functions | |
| int | main (int argc, char **argv) |
| void | PX4Callback (px_comm::OpticalFlow const &msg) |
Variables | |
| double | alpha = Ts/tau |
| quad_can_driver::Attitude | att_msg |
| ros::Publisher | att_pub |
| bool | initialized = false |
| double | K |
| OF_str | OF |
| px_comm::OpticalFlow | OF_Fil |
| ros::Publisher | OF_pub |
| double | tau = 0.2 |
| double | Ts = 0.01 |
Define Documentation
| #define PI 3.14159256 |
Definition at line 6 of file position_controller.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 97 of file position_controller.cpp.
| void PX4Callback | ( | px_comm::OpticalFlow const & | msg | ) |
Definition at line 54 of file position_controller.cpp.
Variable Documentation
Definition at line 28 of file position_controller.cpp.
Definition at line 9 of file position_controller.cpp.
Definition at line 10 of file position_controller.cpp.
| bool initialized = false |
Definition at line 13 of file position_controller.cpp.
| double K |
Definition at line 8 of file position_controller.cpp.
Definition at line 24 of file position_controller.cpp.
| px_comm::OpticalFlow OF_Fil |
Definition at line 29 of file position_controller.cpp.
Definition at line 10 of file position_controller.cpp.
| double tau = 0.2 |
Definition at line 27 of file position_controller.cpp.
| double Ts = 0.01 |
Definition at line 26 of file position_controller.cpp.