#include <string>#include <ros/ros.h>#include <portrait_robot_msgs/alubsc_status_msg.h>#include <tf/tf.h>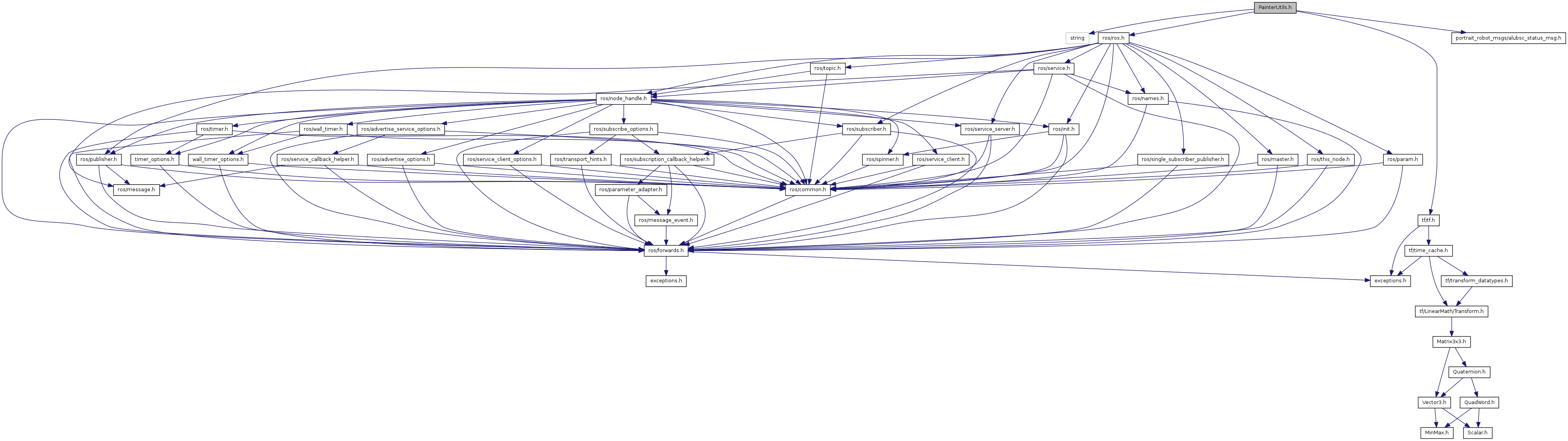

Go to the source code of this file.
Namespaces | |
| namespace | portrait_painter |
Defines | |
| #define | NODE_ID 3 |
| #define | PI 3.14159265 |
Functions | |
| tf::Vector3 | portrait_painter::getGripperPosition () |
| ros::ServiceClient | portrait_painter::getMessageClient (ros::NodeHandle n) |
| void | portrait_painter::moveGripperToInitialPos () |
| void | portrait_painter::sendStatus (string message, ros::ServiceClient client) |
| Send a message to the GUI. | |
| #define NODE_ID 3 |
Definition at line 6 of file PainterUtils.h.
| #define PI 3.14159265 |
Definition at line 7 of file PainterUtils.h.

