#include <unistd.h>#include <sys/time.h>#include <math.h>#include <ros/ros.h>#include <geometry_msgs/Twist.h>#include <std_msgs/Bool.h>#include <tf/transform_broadcaster.h>#include <diagnostic_updater/diagnostic_updater.h>#include <rosie_msgs/PowerState.h>#include "omnilib/omnilib.h"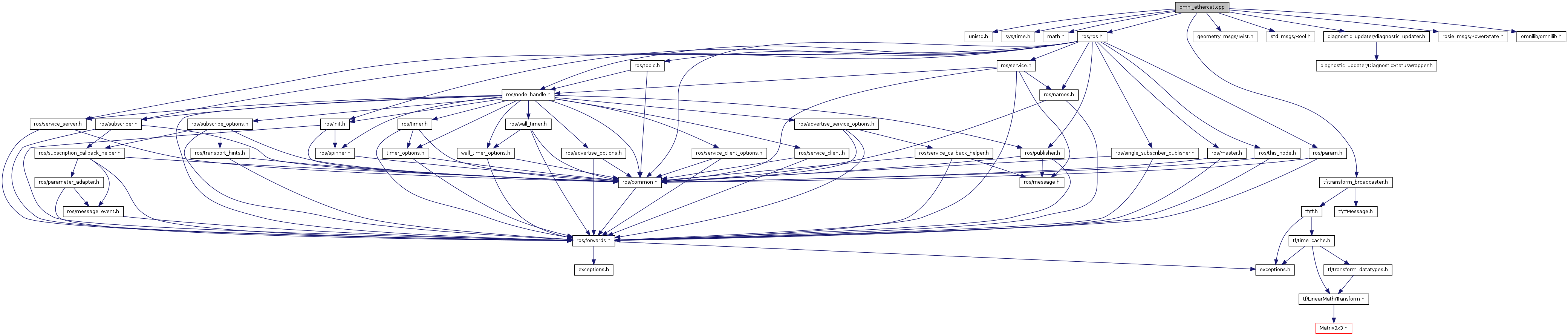
Go to the source code of this file.
Classes | |
| class | Omnidrive |
Defines | |
| #define | LIMIT(x, l) ( (x>l) ? l : (x<-l) ? -l : x ) |
Functions | |
| int | main (int argc, char *argv[]) |
| #define LIMIT | ( | x, | |
| l | |||
| ) | ( (x>l) ? l : (x<-l) ? -l : x ) |
Definition at line 35 of file omni_ethercat.cpp.
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 289 of file omni_ethercat.cpp.

