#include <octomap_ros/conversions.h>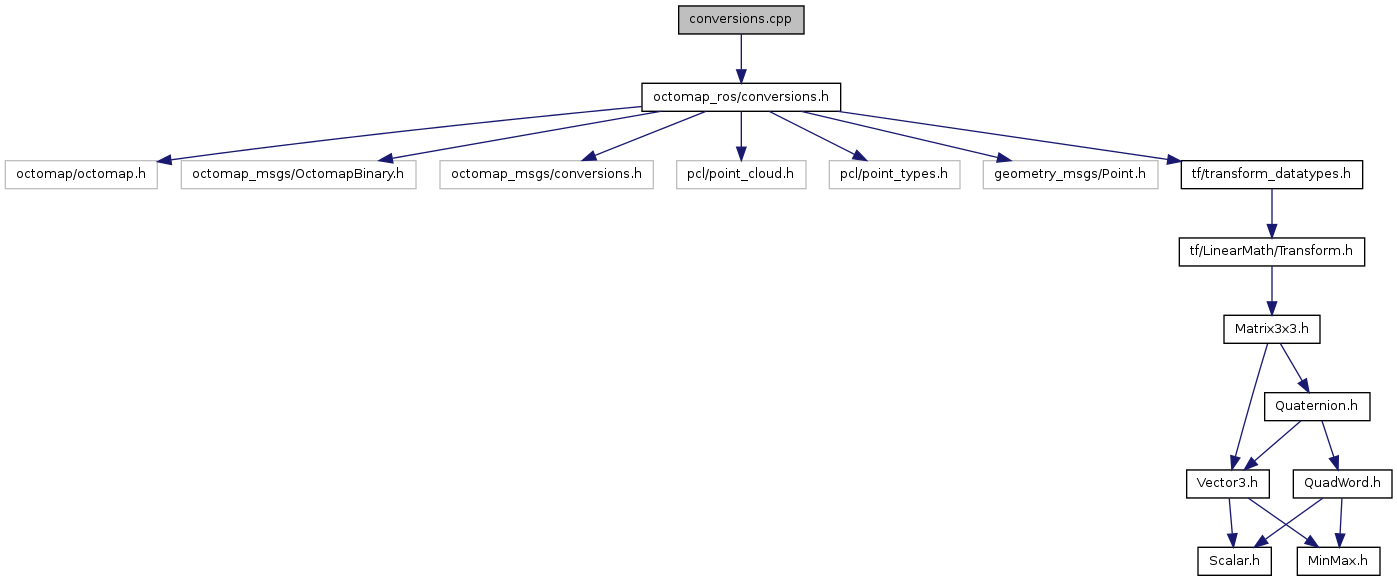
Go to the source code of this file.
Namespaces | |
| namespace | octomap |
Functions | |
| static template void | octomap::pointcloudPCLToOctomap (const pcl::PointCloud< pcl::PointXYZ > &pclCloud, Pointcloud &octomapCloud) |
| static template void | octomap::pointsOctomapToPCL (const point3d_list &points, pcl::PointCloud< pcl::PointXYZ > &cloud) |

