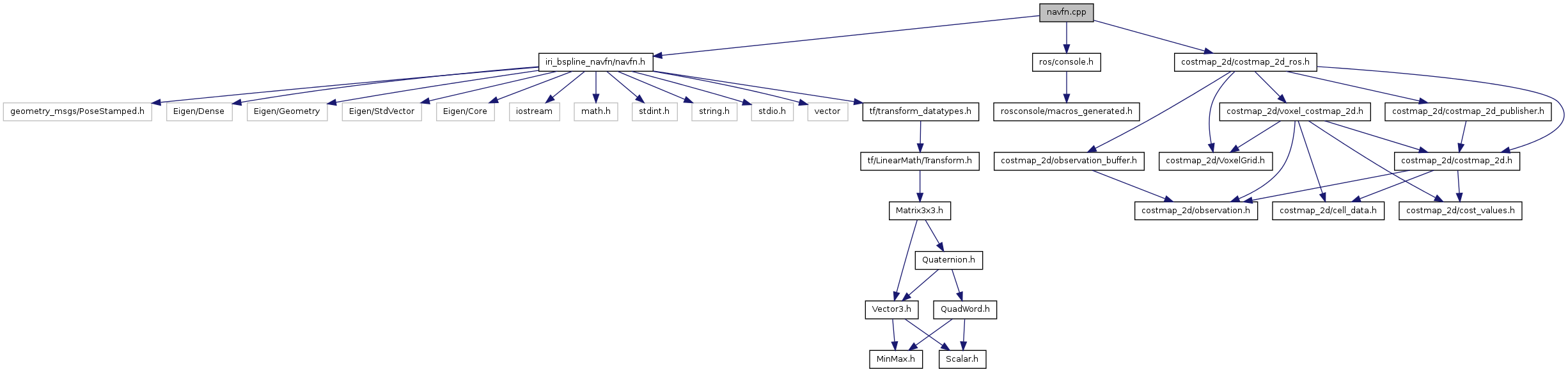
#include <iri_bspline_navfn/navfn.h>#include <ros/console.h>#include <costmap_2d/costmap_2d_ros.h>
Include dependency graph for navfn.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | iri_bspline_navfn |
Defines | |
| #define | INVSQRT2 0.707106781 |
| #define | INVSQRT2 0.707106781 |
| #define | push_cur(n) |
| #define | push_next(n) |
| #define | push_over(n) |
Functions | |
| int | iri_bspline_navfn::create_nav_plan_astar (COSTTYPE *costmap, int nx, int ny, int *goal, int *start, float *plan, int nplan) |
Define Documentation
Value:
{ if (n>=0 && n<ns && !pending[n] && \
costarr[n]<COST_OBS && curPe<PRIORITYBUFSIZE) \
{ curP[curPe++]=n; pending[n]=true; }}
Value:
{ if (n>=0 && n<ns && !pending[n] && \
costarr[n]<COST_OBS && nextPe<PRIORITYBUFSIZE) \
{ nextP[nextPe++]=n; pending[n]=true; }}