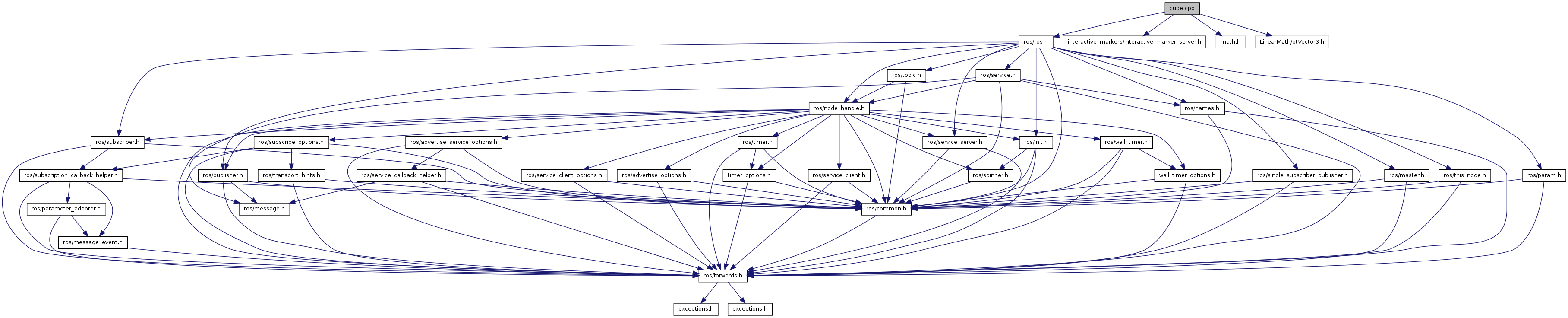
#include <ros/ros.h>#include <interactive_markers/interactive_marker_server.h>#include <math.h>#include <LinearMath/btVector3.h>
Include dependency graph for cube.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| InteractiveMarkerControl & | makeBoxControl (InteractiveMarker &msg) |
| void | makeCube () |
| void | processFeedback (const visualization_msgs::InteractiveMarkerFeedbackConstPtr &feedback) |
Variables | |
| std::vector< btVector3 > | positions |
| boost::shared_ptr < interactive_markers::InteractiveMarkerServer > | server |
Function Documentation
| InteractiveMarkerControl& makeBoxControl | ( | InteractiveMarker & | msg | ) |
| void processFeedback | ( | const visualization_msgs::InteractiveMarkerFeedbackConstPtr & | feedback | ) |
Variable Documentation
| std::vector< btVector3 > positions |
| boost::shared_ptr<interactive_markers::InteractiveMarkerServer> server |