#include <vector>#include <boost/random/variate_generator.hpp>#include <boost/random/mersenne_twister.hpp>#include <boost/random/normal_distribution.hpp>#include <boost/random/uniform_real.hpp>#include <tf/transform_datatypes.h>#include <Eigen/Core>#include <pcl_ros/point_cloud.h>#include <pcl/point_types.h>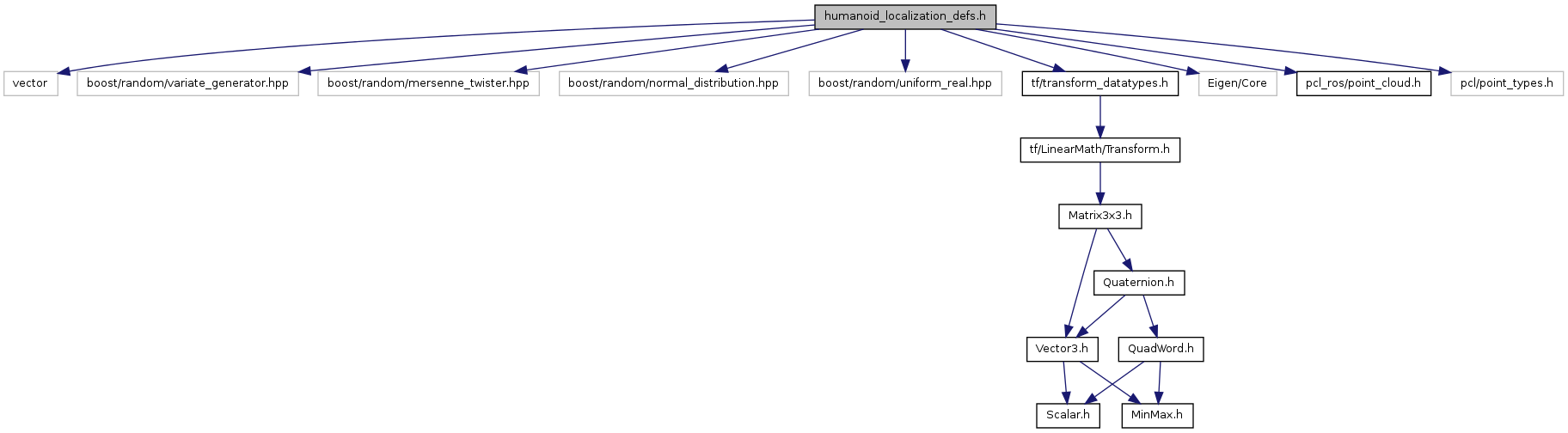

Go to the source code of this file.
Classes | |
| struct | humanoid_localization::Particle |
| Particle consists of a pose and a weight. More... | |
Namespaces | |
| namespace | humanoid_localization |
Typedefs | |
| typedef boost::mt19937 | humanoid_localization::EngineT |
| Boost RNG engine: | |
| typedef Eigen::Matrix< double, 6, 6 > | humanoid_localization::Matrix6d |
| typedef Eigen::Matrix< float, 6, 6 > | humanoid_localization::Matrix6f |
| typedef boost::normal_distribution | humanoid_localization::NormalDistributionT |
| Boost RNG distribution: | |
| typedef boost::variate_generator < EngineT &, NormalDistributionT > | humanoid_localization::NormalGeneratorT |
| standard normal-distributed noise | |
| typedef std::vector< Particle > | humanoid_localization::Particles |
| typedef pcl::PointCloud < pcl::PointXYZ > | humanoid_localization::PointCloud |
| typedef boost::uniform_real | humanoid_localization::UniformDistributionT |
| typedef boost::variate_generator < EngineT &, UniformDistributionT > | humanoid_localization::UniformGeneratorT |
| uniform noise in range [0,1) | |
| typedef Eigen::Matrix< double, 6, 1 > | humanoid_localization::Vector6d |
| typedef Eigen::Matrix< float, 6, 1 > | humanoid_localization::Vector6f |

