#include <motion_base.h>
Public Member Functions | |
| virtual FCL_REAL | computeMotionBound (const BV &bv, const Vec3f &n) const =0 |
| Compute the motion bound for a bounding volume, given the closest direction n between two query objects. | |
| virtual FCL_REAL | computeMotionBound (const Vec3f &a, const Vec3f &b, const Vec3f &c, const Vec3f &n) const =0 |
| Compute the motion bound for a triangle, given the closest direction n between two query objects. | |
| virtual void | getCurrentRotation (Matrix3f &R) const =0 |
| virtual void | getCurrentTransform (Matrix3f &R, Vec3f &T) const =0 |
| Get the rotation and translation in current step. | |
| virtual void | getCurrentTransform (Transform3f &tf) const =0 |
| virtual void | getCurrentTranslation (Vec3f &T) const =0 |
| virtual bool | integrate (double dt)=0 |
| Integrate the motion from 0 to dt. | |
| virtual | ~MotionBase () |
Definition at line 49 of file motion_base.h.
| virtual fcl::MotionBase< BV >::~MotionBase | ( | ) | [inline, virtual] |
Definition at line 52 of file motion_base.h.
| virtual FCL_REAL fcl::MotionBase< BV >::computeMotionBound | ( | const BV & | bv, |
| const Vec3f & | n | ||
| ) | const [pure virtual] |
Compute the motion bound for a bounding volume, given the closest direction n between two query objects.
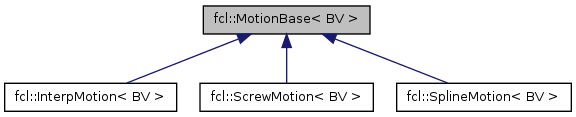
Implemented in fcl::InterpMotion< BV >, fcl::ScrewMotion< BV >, and fcl::SplineMotion< BV >.
| virtual FCL_REAL fcl::MotionBase< BV >::computeMotionBound | ( | const Vec3f & | a, |
| const Vec3f & | b, | ||
| const Vec3f & | c, | ||
| const Vec3f & | n | ||
| ) | const [pure virtual] |
Compute the motion bound for a triangle, given the closest direction n between two query objects.
Implemented in fcl::InterpMotion< BV >, fcl::ScrewMotion< BV >, and fcl::SplineMotion< BV >.
| virtual void fcl::MotionBase< BV >::getCurrentRotation | ( | Matrix3f & | R | ) | const [pure virtual] |
Implemented in fcl::InterpMotion< BV >, fcl::ScrewMotion< BV >, and fcl::SplineMotion< BV >.
| virtual void fcl::MotionBase< BV >::getCurrentTransform | ( | Matrix3f & | R, |
| Vec3f & | T | ||
| ) | const [pure virtual] |
Get the rotation and translation in current step.
Implemented in fcl::InterpMotion< BV >, fcl::ScrewMotion< BV >, and fcl::SplineMotion< BV >.
| virtual void fcl::MotionBase< BV >::getCurrentTransform | ( | Transform3f & | tf | ) | const [pure virtual] |
Implemented in fcl::InterpMotion< BV >, fcl::ScrewMotion< BV >, and fcl::SplineMotion< BV >.
| virtual void fcl::MotionBase< BV >::getCurrentTranslation | ( | Vec3f & | T | ) | const [pure virtual] |
Implemented in fcl::InterpMotion< BV >, fcl::ScrewMotion< BV >, and fcl::SplineMotion< BV >.
| virtual bool fcl::MotionBase< BV >::integrate | ( | double | dt | ) | [pure virtual] |
Integrate the motion from 0 to dt.
Implemented in fcl::InterpMotion< BV >, fcl::ScrewMotion< BV >, and fcl::SplineMotion< BV >.

