Scales the time intervals stretching them if necessary so that the trajectory conforms to velocity limits. More...
#include <cubic_spline_shortcutter.h>
Public Member Functions | |
| virtual bool | configure () |
| Configure the filter with the discretization for returned trajectories. | |
| CubicSplineShortCutter () | |
| Construct the smoother. | |
| virtual bool | smooth (const T &trajectory_in, T &trajectory_out) const |
| virtual | ~CubicSplineShortCutter () |
Private Member Functions | |
| bool | addToTrajectory (trajectory_msgs::JointTrajectory &trajectory_out, const trajectory_msgs::JointTrajectoryPoint &trajectory_point, const ros::Duration &delta_time) const |
| void | discretizeAndAppendSegment (const spline_smoother::SplineTrajectorySegment &spline_segment, const double &discretization, trajectory_msgs::JointTrajectory &joint_trajectory, const ros::Duration &segment_start_time, const bool &include_segment_end) const |
| void | discretizeTrajectory (const spline_smoother::SplineTrajectory &spline, const double &discretization, trajectory_msgs::JointTrajectory &joint_trajectory) const |
| bool | findTrajectoryPointsInInterval (const trajectory_msgs::JointTrajectory &trajectory, const double &segment_start_time, const double &segment_end_time, int &index_1, int &index_2) const |
| int | getRandomInt (int min, int max) const |
| double | getRandomTimeStamp (double min, double max) const |
| bool | getWaypoints (const spline_smoother::SplineTrajectory &spline, trajectory_msgs::JointTrajectory &joint_trajectory) const |
| double | maxLInfDistance (const trajectory_msgs::JointTrajectoryPoint &start, const trajectory_msgs::JointTrajectoryPoint &end) const |
| void | printTrajectory (const trajectory_msgs::JointTrajectory &joint_trajectory) const |
| void | refineTrajectory (T &trajectory) const |
| bool | setupCollisionEnvironment () |
| bool | trimTrajectory (trajectory_msgs::JointTrajectory &trajectory_out, const double &segment_start_time, const double &segment_end_time) const |
Private Attributes | |
| bool | active_ |
| planning_environment::CollisionModelsInterface * | collision_models_interface_ |
| double | discretization_ |
Detailed Description
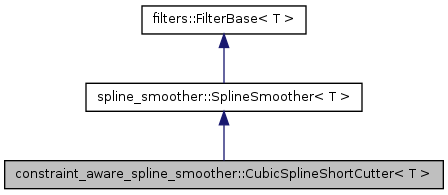
template<typename T>
class constraint_aware_spline_smoother::CubicSplineShortCutter< T >
Scales the time intervals stretching them if necessary so that the trajectory conforms to velocity limits.
Definition at line 57 of file cubic_spline_shortcutter.h.
Constructor & Destructor Documentation
| constraint_aware_spline_smoother::CubicSplineShortCutter< T >::CubicSplineShortCutter | ( | ) |
Construct the smoother.
Definition at line 126 of file cubic_spline_shortcutter.h.
| constraint_aware_spline_smoother::CubicSplineShortCutter< T >::~CubicSplineShortCutter | ( | ) | [virtual] |
Definition at line 135 of file cubic_spline_shortcutter.h.
Member Function Documentation
| bool constraint_aware_spline_smoother::CubicSplineShortCutter< T >::addToTrajectory | ( | trajectory_msgs::JointTrajectory & | trajectory_out, |
| const trajectory_msgs::JointTrajectoryPoint & | trajectory_point, | ||
| const ros::Duration & | delta_time | ||
| ) | const [private] |
Definition at line 650 of file cubic_spline_shortcutter.h.
| bool constraint_aware_spline_smoother::CubicSplineShortCutter< T >::configure | ( | void | ) | [virtual] |
Configure the filter with the discretization for returned trajectories.
- Todo:
- check length
Reimplemented from spline_smoother::SplineSmoother< T >.
Definition at line 111 of file cubic_spline_shortcutter.h.
| void constraint_aware_spline_smoother::CubicSplineShortCutter< T >::discretizeAndAppendSegment | ( | const spline_smoother::SplineTrajectorySegment & | spline_segment, |
| const double & | discretization, | ||
| trajectory_msgs::JointTrajectory & | joint_trajectory, | ||
| const ros::Duration & | segment_start_time, | ||
| const bool & | include_segment_end | ||
| ) | const [private] |
Definition at line 506 of file cubic_spline_shortcutter.h.
| void constraint_aware_spline_smoother::CubicSplineShortCutter< T >::discretizeTrajectory | ( | const spline_smoother::SplineTrajectory & | spline, |
| const double & | discretization, | ||
| trajectory_msgs::JointTrajectory & | joint_trajectory | ||
| ) | const [private] |
Definition at line 486 of file cubic_spline_shortcutter.h.
| bool constraint_aware_spline_smoother::CubicSplineShortCutter< T >::findTrajectoryPointsInInterval | ( | const trajectory_msgs::JointTrajectory & | trajectory, |
| const double & | segment_start_time, | ||
| const double & | segment_end_time, | ||
| int & | index_1, | ||
| int & | index_2 | ||
| ) | const [private] |
Definition at line 594 of file cubic_spline_shortcutter.h.
| int constraint_aware_spline_smoother::CubicSplineShortCutter< T >::getRandomInt | ( | int | min, |
| int | max | ||
| ) | const [private] |
Definition at line 140 of file cubic_spline_shortcutter.h.
| double constraint_aware_spline_smoother::CubicSplineShortCutter< T >::getRandomTimeStamp | ( | double | min, |
| double | max | ||
| ) | const [private] |
Definition at line 148 of file cubic_spline_shortcutter.h.
| bool constraint_aware_spline_smoother::CubicSplineShortCutter< T >::getWaypoints | ( | const spline_smoother::SplineTrajectory & | spline, |
| trajectory_msgs::JointTrajectory & | joint_trajectory | ||
| ) | const [private] |
Definition at line 632 of file cubic_spline_shortcutter.h.
| double constraint_aware_spline_smoother::CubicSplineShortCutter< T >::maxLInfDistance | ( | const trajectory_msgs::JointTrajectoryPoint & | start, |
| const trajectory_msgs::JointTrajectoryPoint & | end | ||
| ) | const [private] |
Definition at line 550 of file cubic_spline_shortcutter.h.
| void constraint_aware_spline_smoother::CubicSplineShortCutter< T >::printTrajectory | ( | const trajectory_msgs::JointTrajectory & | joint_trajectory | ) | const [private] |
Definition at line 435 of file cubic_spline_shortcutter.h.
| void constraint_aware_spline_smoother::CubicSplineShortCutter< T >::refineTrajectory | ( | T & | trajectory | ) | const [private] |
Definition at line 406 of file cubic_spline_shortcutter.h.
| bool constraint_aware_spline_smoother::CubicSplineShortCutter< T >::setupCollisionEnvironment | ( | ) | [private] |
Definition at line 692 of file cubic_spline_shortcutter.h.
| bool constraint_aware_spline_smoother::CubicSplineShortCutter< T >::smooth | ( | const T & | trajectory_in, |
| T & | trajectory_out | ||
| ) | const [virtual] |
Implements spline_smoother::SplineSmoother< T >.
Definition at line 156 of file cubic_spline_shortcutter.h.
| bool constraint_aware_spline_smoother::CubicSplineShortCutter< T >::trimTrajectory | ( | trajectory_msgs::JointTrajectory & | trajectory_out, |
| const double & | segment_start_time, | ||
| const double & | segment_end_time | ||
| ) | const [private] |
Definition at line 566 of file cubic_spline_shortcutter.h.
Member Data Documentation
bool constraint_aware_spline_smoother::CubicSplineShortCutter< T >::active_ [private] |
Definition at line 71 of file cubic_spline_shortcutter.h.
planning_environment::CollisionModelsInterface* constraint_aware_spline_smoother::CubicSplineShortCutter< T >::collision_models_interface_ [private] |
Definition at line 74 of file cubic_spline_shortcutter.h.
double constraint_aware_spline_smoother::CubicSplineShortCutter< T >::discretization_ [private] |
Definition at line 72 of file cubic_spline_shortcutter.h.
The documentation for this class was generated from the following file: