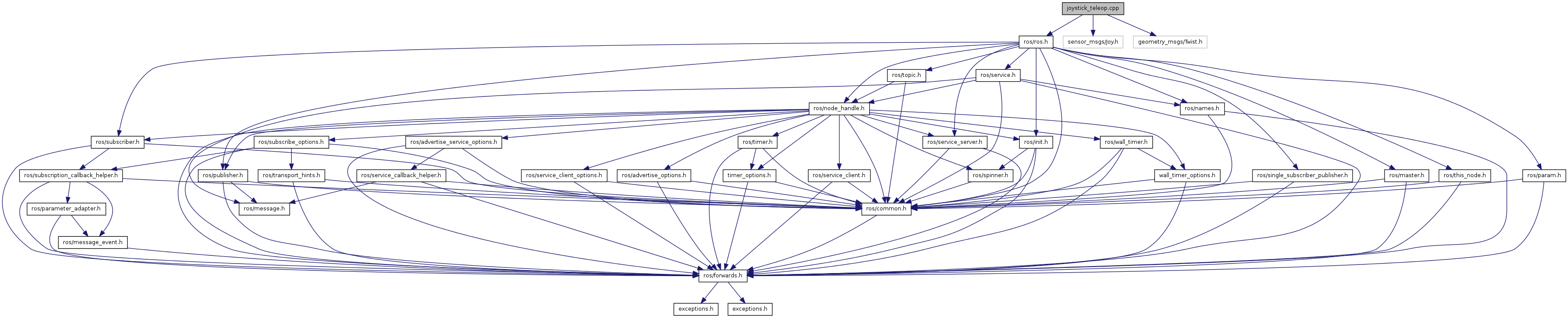
Include dependency graph for joystick_teleop.cpp:
Go to the source code of this file.
Functions | |
| void | joyCallback (const sensor_msgs::Joy::ConstPtr &joy_msg) |
| int | main (int argc, char **argv) |
Variables | |
| const double | max_rotation = 0.2 |
| const double | max_speed_x = 0.1 |
| const double | max_speed_y = 0.05 |
| double | vel_rot |
| double | vel_x |
| double | vel_y |
Function Documentation
| void joyCallback | ( | const sensor_msgs::Joy::ConstPtr & | joy_msg | ) |
Definition at line 16 of file joystick_teleop.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 41 of file joystick_teleop.cpp.
Variable Documentation
| const double max_rotation = 0.2 |
Definition at line 13 of file joystick_teleop.cpp.
| const double max_speed_x = 0.1 |
Definition at line 11 of file joystick_teleop.cpp.
| const double max_speed_y = 0.05 |
Definition at line 12 of file joystick_teleop.cpp.
| double vel_rot |
Definition at line 14 of file joystick_teleop.cpp.
| double vel_x |
Definition at line 14 of file joystick_teleop.cpp.
| double vel_y |
Definition at line 14 of file joystick_teleop.cpp.