#include <helpers.hpp>
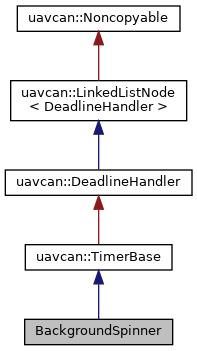
Inheritance diagram for BackgroundSpinner:
Public Member Functions | |
| BackgroundSpinner (uavcan::INode &spinning_node, uavcan::INode &running_node) | |
| virtual void | handleTimerEvent (const uavcan::TimerEvent &) |
 Public Member Functions inherited from uavcan::TimerBase Public Member Functions inherited from uavcan::TimerBase | |
| MonotonicTime | getDeadline () const |
| MonotonicDuration | getPeriod () const |
| Scheduler & | getScheduler () const |
| bool | isRunning () const |
| void | startOneShotWithDeadline (MonotonicTime deadline) |
| void | startOneShotWithDelay (MonotonicDuration delay) |
| void | startPeriodic (MonotonicDuration period) |
| void | stop () |
| TimerBase (INode &node) | |
Public Attributes | |
| uavcan::INode & | spinning_node |
Detailed Description
Definition at line 119 of file libuavcan/libuavcan/test/protocol/helpers.hpp.
Constructor & Destructor Documentation
◆ BackgroundSpinner()
|
inline |
Definition at line 123 of file libuavcan/libuavcan/test/protocol/helpers.hpp.
Member Function Documentation
◆ handleTimerEvent()
|
inlinevirtual |
Implement this method in your class to receive callbacks.
Implements uavcan::TimerBase.
Definition at line 128 of file libuavcan/libuavcan/test/protocol/helpers.hpp.
Member Data Documentation
◆ spinning_node
| uavcan::INode& BackgroundSpinner::spinning_node |
Definition at line 121 of file libuavcan/libuavcan/test/protocol/helpers.hpp.
The documentation for this struct was generated from the following file: