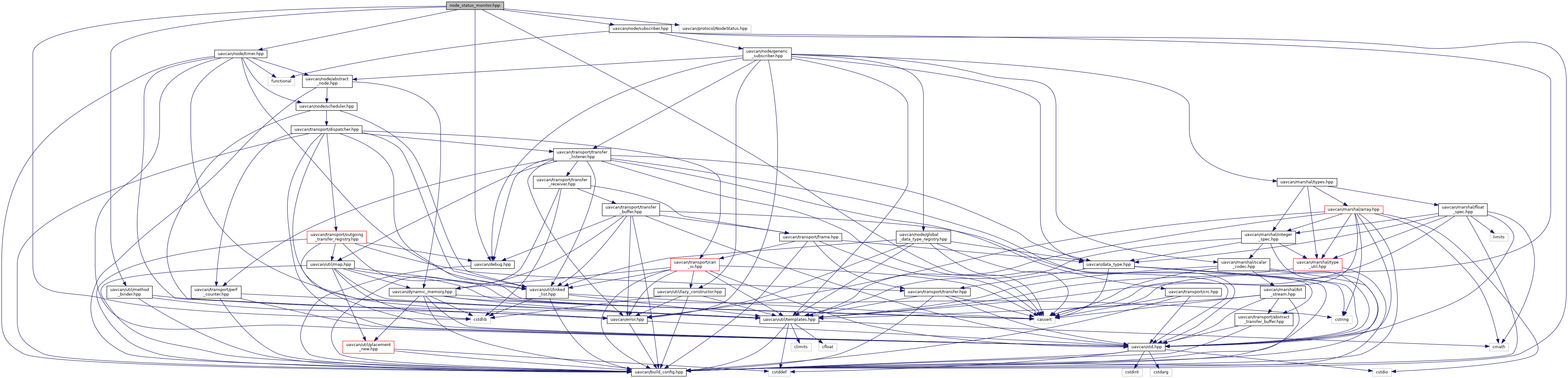
#include <uavcan/debug.hpp>#include <uavcan/util/method_binder.hpp>#include <uavcan/node/subscriber.hpp>#include <uavcan/node/timer.hpp>#include <uavcan/protocol/NodeStatus.hpp>#include <cassert>#include <cstdlib>
Include dependency graph for node_status_monitor.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | uavcan::NodeStatusMonitor::Entry |
| struct | uavcan::NodeStatusMonitor::NodeStatus |
| struct | uavcan::NodeStatusMonitor::NodeStatusChangeEvent |
| class | uavcan::NodeStatusMonitor |
Namespaces | |
| uavcan | |