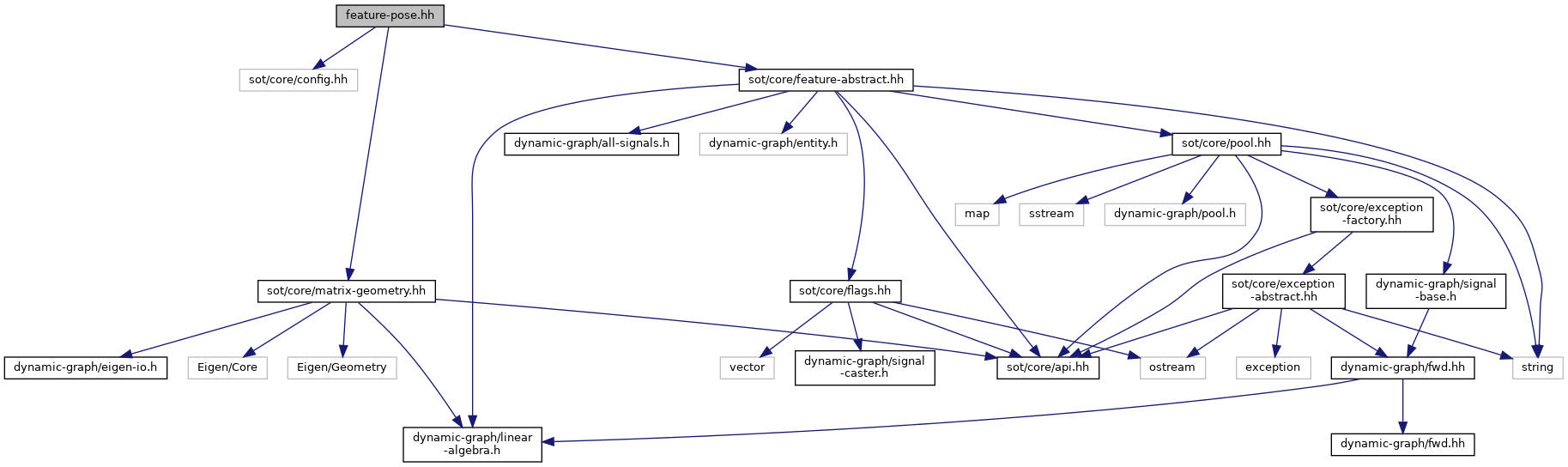
#include <sot/core/config.hh>#include <sot/core/feature-abstract.hh>#include <sot/core/matrix-geometry.hh>
Include dependency graph for feature-pose.hh:
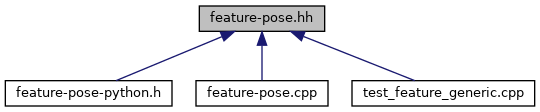
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | dynamicgraph::sot::FeaturePose< representation > |
| Feature that controls the relative (or absolute) pose between two frames A (or world) and B. More... | |
Namespaces | |
| dynamicgraph | |
| dynamicgraph::sot | |
Typedefs | |
| typedef FeaturePose< R3xSO3Representation > | dynamicgraph::sot::FeaturePose_t |
| typedef FeaturePose< SE3Representation > | dynamicgraph::sot::FeaturePoseSE3_t |
Enumerations | |
| enum | dynamicgraph::sot::Representation_t { dynamicgraph::sot::SE3Representation, dynamicgraph::sot::R3xSO3Representation } |
| Enum used to specify what difference operation is used in FeaturePose. More... | |
Functions | |
| template<typename T > | |
| Vector6d | dynamicgraph::sot::convertVelocity (const MatrixHomogeneous &M, const MatrixHomogeneous &Mdes, const Vector &faNufafbDes) |