#include <Karto.h>
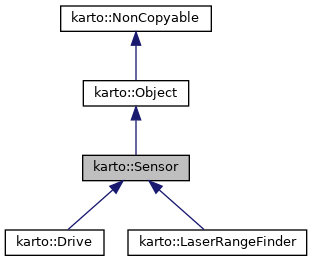
Abstract Sensor base class
Definition at line 3600 of file Karto.h.
◆ Sensor() [1/3]
| karto::Sensor::Sensor |
( |
| ) |
|
|
inline |
◆ Sensor() [2/3]
| karto::Sensor::Sensor |
( |
const Name & |
rName | ) |
|
|
protected |
◆ ~Sensor()
| karto::Sensor::~Sensor |
( |
| ) |
|
|
virtual |
◆ Sensor() [3/3]
| karto::Sensor::Sensor |
( |
const Sensor & |
| ) |
|
|
private |
Restrict the copy constructor
◆ GetOffsetPose()
| const Pose2& karto::Sensor::GetOffsetPose |
( |
| ) |
const |
|
inline |
Gets this range finder sensor's offset
- Returns
- offset pose
Definition at line 3632 of file Karto.h.
◆ operator=()
Restrict the assignment operator
◆ serialize()
template<class Archive >
| void karto::Sensor::serialize |
( |
Archive & |
ar, |
|
|
const unsigned int |
version |
|
) |
| |
|
inlineprivate |
◆ SetOffsetPose()
| void karto::Sensor::SetOffsetPose |
( |
const Pose2 & |
rPose | ) |
|
|
inline |
Sets this range finder sensor's offset
- Parameters
-
Definition at line 3641 of file Karto.h.
◆ Validate() [1/2]
| virtual kt_bool karto::Sensor::Validate |
( |
| ) |
|
|
pure virtual |
◆ Validate() [2/2]
◆ boost::serialization::access
| friend class boost::serialization::access |
|
friend |
◆ m_pOffsetPose
The documentation for this class was generated from the following files:
 Public Member Functions inherited from karto::Object
Public Member Functions inherited from karto::Object