#include <command_sender.h>
Definition at line 712 of file command_sender.h.
◆ JointPositionBinaryCommandSender()
| rm_common::JointPositionBinaryCommandSender::JointPositionBinaryCommandSender |
( |
ros::NodeHandle & |
nh | ) |
|
|
inlineexplicit |
◆ changePosition()
| void rm_common::JointPositionBinaryCommandSender::changePosition |
( |
double |
scale | ) |
|
|
inline |
◆ getState()
| bool rm_common::JointPositionBinaryCommandSender::getState |
( |
| ) |
const |
|
inline |
◆ off()
| void rm_common::JointPositionBinaryCommandSender::off |
( |
| ) |
|
|
inline |
◆ on()
| void rm_common::JointPositionBinaryCommandSender::on |
( |
| ) |
|
|
inline |
◆ sendCommand()
| void rm_common::JointPositionBinaryCommandSender::sendCommand |
( |
const ros::Time & |
time | ) |
|
|
inlineoverridevirtual |
◆ setZero()
| void rm_common::JointPositionBinaryCommandSender::setZero |
( |
| ) |
|
|
inlineoverridevirtual |
◆ change_position_
| double rm_common::JointPositionBinaryCommandSender::change_position_ {} |
|
private |
◆ current_position_
| double rm_common::JointPositionBinaryCommandSender::current_position_ {} |
|
private |
◆ off_pos_
| double rm_common::JointPositionBinaryCommandSender::off_pos_ {} |
|
private |
◆ on_pos_
| double rm_common::JointPositionBinaryCommandSender::on_pos_ {} |
|
private |
◆ per_change_position_
| double rm_common::JointPositionBinaryCommandSender::per_change_position_ { 0.05 } |
|
private |
◆ state
| bool rm_common::JointPositionBinaryCommandSender::state {} |
|
private |
The documentation for this class was generated from the following file:
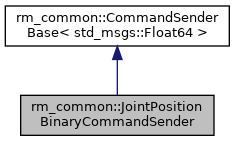
 Public Member Functions inherited from rm_common::CommandSenderBase< std_msgs::Float64 >
Public Member Functions inherited from rm_common::CommandSenderBase< std_msgs::Float64 >