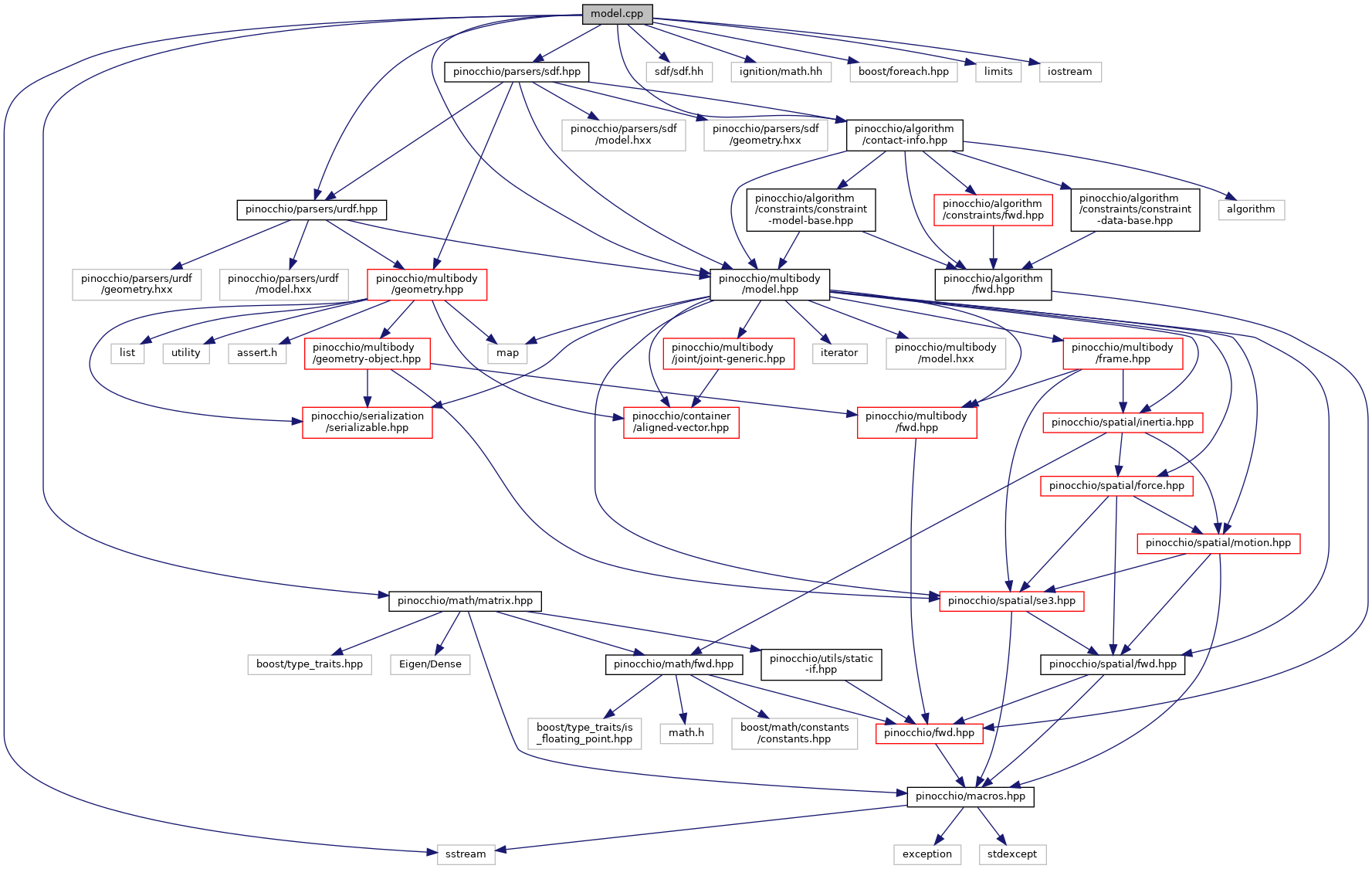
#include "pinocchio/math/matrix.hpp"#include "pinocchio/parsers/sdf.hpp"#include "pinocchio/parsers/urdf.hpp"#include "pinocchio/multibody/model.hpp"#include "pinocchio/algorithm/contact-info.hpp"#include <sdf/sdf.hh>#include <ignition/math.hh>#include <sstream>#include <boost/foreach.hpp>#include <limits>#include <iostream>
Include dependency graph for src/parsers/sdf/model.cpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::sdf | |
| pinocchio::sdf::details | |
Functions | |
| const std::string | pinocchio::sdf::details::findRootLink (const SdfGraph &graph) |
| void | pinocchio::sdf::details::parseContactInformation (const SdfGraph &graph, const urdf::details::UrdfVisitorBase &visitor, const Model &model, PINOCCHIO_STD_VECTOR_WITH_EIGEN_ALLOCATOR(RigidConstraintModel) &contact_models) |
| void | pinocchio::sdf::details::parseRootTree (SdfGraph &graph, const std::string &rootLinkName) |