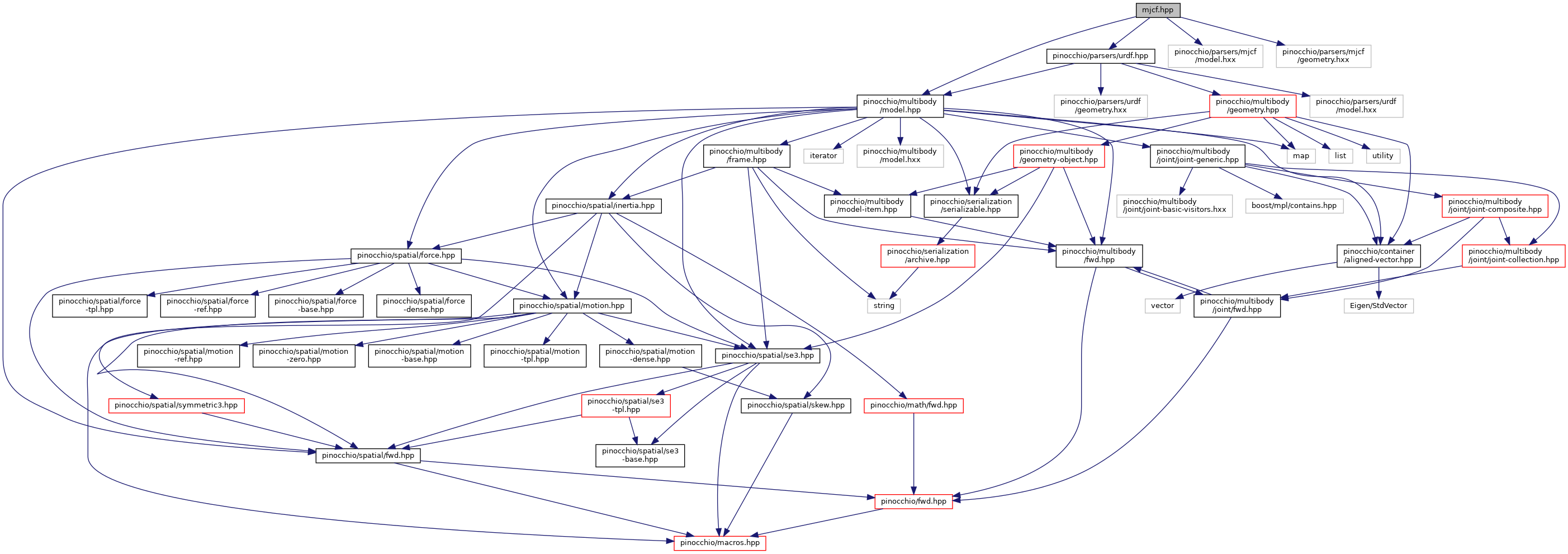
#include "pinocchio/multibody/model.hpp"#include "pinocchio/parsers/urdf.hpp"#include "pinocchio/multibody/geometry.hpp"#include "pinocchio/algorithm/contact-info.hpp"#include "pinocchio/parsers/mjcf/model.hxx"#include "pinocchio/parsers/mjcf/geometry.hxx"
Include dependency graph for parsers/mjcf.hpp:
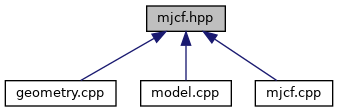
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::mjcf | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| GeometryModel & | pinocchio::mjcf::buildGeom (ModelTpl< Scalar, Options, JointCollectionTpl > &model, const std::string &filename, const GeometryType type, GeometryModel &geom_model, ::hpp::fcl::MeshLoaderPtr mesh_loader=::hpp::fcl::MeshLoaderPtr()) |
| Build The GeometryModel from a Mjcf file. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModel (const std::string &filename, const typename ModelTpl< Scalar, Options, JointCollectionTpl >::JointModel &rootJoint, const std::string &rootJointName, ModelTpl< Scalar, Options, JointCollectionTpl > &model, const bool verbose=false) |
| Build the model from a MJCF file with a particular joint as root of the model tree inside the model given as reference argument. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModel (const std::string &filename, const typename ModelTpl< Scalar, Options, JointCollectionTpl >::JointModel &rootJoint, const std::string &rootJointName, ModelTpl< Scalar, Options, JointCollectionTpl > &model, PINOCCHIO_STD_VECTOR_WITH_EIGEN_ALLOCATOR(RigidConstraintModel) &contact_models, const bool verbose=false) |
| Build the model from a MJCF file with a particular joint as root of the model tree inside the model given as reference argument. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModel (const std::string &filename, const typename ModelTpl< Scalar, Options, JointCollectionTpl >::JointModel &rootJoint, ModelTpl< Scalar, Options, JointCollectionTpl > &model, const bool verbose=false) |
| Build the model from a MJCF file with a particular joint as root of the model tree inside the model given as reference argument. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModel (const std::string &filename, const typename ModelTpl< Scalar, Options, JointCollectionTpl >::JointModel &rootJoint, ModelTpl< Scalar, Options, JointCollectionTpl > &model, PINOCCHIO_STD_VECTOR_WITH_EIGEN_ALLOCATOR(RigidConstraintModel) &contact_models, const bool verbose=false) |
| Build the model from a MJCF file with a particular joint as root of the model tree inside the model given as reference argument. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModel (const std::string &filename, ModelTpl< Scalar, Options, JointCollectionTpl > &model, const bool verbose=false) |
| Build the model from a MJCF file with a fixed joint as root of the model tree. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModel (const std::string &filename, ModelTpl< Scalar, Options, JointCollectionTpl > &model, PINOCCHIO_STD_VECTOR_WITH_EIGEN_ALLOCATOR(RigidConstraintModel) &contact_models, const bool verbose=false) |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModelFromXML (const std::string &xmlStream, const typename ModelTpl< Scalar, Options, JointCollectionTpl >::JointModel &rootJoint, const std::string &rootJointName, ModelTpl< Scalar, Options, JointCollectionTpl > &model, const bool verbose=false) |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModelFromXML (const std::string &xmlStream, const typename ModelTpl< Scalar, Options, JointCollectionTpl >::JointModel &rootJoint, const std::string &rootJointName, ModelTpl< Scalar, Options, JointCollectionTpl > &model, PINOCCHIO_STD_VECTOR_WITH_EIGEN_ALLOCATOR(RigidConstraintModel) &contact_models, const bool verbose=false) |
| Build the model from an XML stream with a particular joint as root of the model tree inside the model given as reference argument. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModelFromXML (const std::string &xmlStream, const typename ModelTpl< Scalar, Options, JointCollectionTpl >::JointModel &rootJoint, ModelTpl< Scalar, Options, JointCollectionTpl > &model, const bool verbose=false) |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModelFromXML (const std::string &xmlStream, const typename ModelTpl< Scalar, Options, JointCollectionTpl >::JointModel &rootJoint, ModelTpl< Scalar, Options, JointCollectionTpl > &model, PINOCCHIO_STD_VECTOR_WITH_EIGEN_ALLOCATOR(RigidConstraintModel) &contact_models, const bool verbose) |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModelFromXML (const std::string &xmlStream, ModelTpl< Scalar, Options, JointCollectionTpl > &model, const bool verbose=false) |
| Build the model from a MJCF file with a fixed joint as root of the model tree. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > & | pinocchio::mjcf::buildModelFromXML (const std::string &xmlStream, ModelTpl< Scalar, Options, JointCollectionTpl > &model, PINOCCHIO_STD_VECTOR_WITH_EIGEN_ALLOCATOR(RigidConstraintModel) &contact_models, const bool verbose=false) |